Systems based on robotics have already been implemented in a number of real-world settings, including some manufacturing and industrial facilities. In these establishments, robots can assist human workers on the assembly line and in the warehouse by assembling some product components with high precision and then handing them over to human agents, who are tasked with carrying out additional tasks.
Researchers in the fields of robotics and computer science have been attempting to create increasingly sophisticated systems over the past few years with the goal of enhancing these interactions between robots and humans in industrial settings. The so-called “digital twin” systems, which are virtual models created to precisely replicate a physical object, such as a specific product or component that is being manufactured, are the foundation of some of the suggested solutions.
Specialists at Nanjing College of Flying and Astronautics in China as of late presented another advanced twin framework that could work on the joint effort among human and automated specialists in assembling settings. This framework, presented in a paper distributed in Mechanical Technology and PC Coordinated Assembling, can serve as a virtual guide for genuine conditions to design and execute reasonable robot ways of behaving as they help out people on a given undertaking.
“In industrial settings, current methods for building a human digital twin model rely on motion capture devices that require personnel to wear cumbersome equipment, which runs counter to the HRC principle of flexible interaction.”
Zequn Zhang, Yuchen Ji and their colleagues wrote in their paper.
In their paper, Zequn Zhang, Yuchen Ji, and their colleagues wrote, “The current methods for constructing a human digital twin model in industrial settings rely on motion capture devices that require personnel to wear cumbersome equipment, which goes against the principle of flexible interaction advocated for HRC.”
“Moreover, the ongoing strategies don’t show people and robots in a bound-together space, which is both unintuitive and badly designed for seeing and figuring out the general climate. This paper proposes a digital twin HRC system to overcome these limitations.”
The computerized twin framework made by Zhang, Ji, and their partners makes a virtual copy of a scene in which a human and robot specialist are working together. After that, it designs and implements efficient collaborative strategies in a real-world setting.
Recently proposed advanced twin frameworks that depend on information gathered by movement catch sensors have been found to, in some cases, accomplish unsuitable outcomes within the sight of impediments (i.e., when items or specialists of interest are beyond the sensors’ field of view or are taken cover behind deterrents). The scientists subsequently fostered a human lattice recuperation calculation, a computational procedure that can assist with reproducing blocked human bodies.
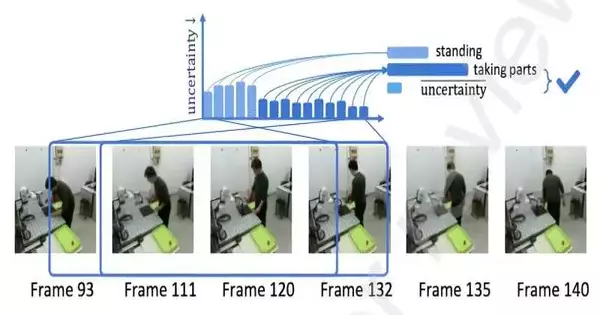
An uncertainty estimation method was also included in the system by Zhang, Ji, and their colleagues. This method permits them to improve the exhibition of the activity acknowledgment calculation, a part of their framework prepared to perceive different human activities, by controlling the gamble that this calculation will make blunders.
The specialists assessed their new computerized twin framework in a progression of examinations in research center settings, utilizing a robot intended to be conveyed in modern settings. Their framework was found to improve the joint effort between this robot and a human specialist in different undertakings, including errands that elaborate cleaning, getting, collecting, and setting down objects.
Zhang, Ji, and their colleagues stated, “Experimental results demonstrate the superiority of the proposed methods over baseline methods.” At long last, the possibility and viability of the HRC framework are approved through a contextual investigation, including part gathering.”
The digital twin system that Zhang, Ji, and their colleagues developed could soon be used on other industrial robots and further tested in additional experiments. In the end, it could be used in real-world settings to improve how robots and humans work together on a variety of manufacturing and industrial tasks.
More information: Zequn Zhang et al, Enabling collaborative assembly between humans and robots using a digital twin system, Robotics and Computer-Integrated Manufacturing (2023). DOI: 10.1016/j.rcim.2023.102691.




