Scientists at the University of California, Berkeley (UC Berkeley), Université de Montréal, and Mila have as of late fostered a progressive support learning system to work on the accuracy of quadrupedal robots in soccer shooting. This system, presented in a pre-distributed paper on arXiv, was sent on a Unitree A1, a quadruped robot created by UnitreeRobotics.
“Human legs are for motion as well as being utilized for control like playing soccer, and we need to empower quadrupedal robots to likewise achieve this capacity,” Zhongyu Li, one of the analysts who did the review, told TechXplore. “There is an eminent association in the mechanical technology local area called “RoboCup” (Robot World Cup) that has been welcoming scientists to prepare their robots to play soccer matches for quite a long time.”
Recent advancements have enabled the development of more robust equipment and high-level control calculations for robots.Thus, robots are currently more spry and might actually handle more intricate errands, including playing soccer close to people. The system created by Li and his partners could assist with working on the capacity of quadruped robots to shoot the ball during soccer matches.
In the robotics community, there is a prestigious league known as “RoboCup” (Robot World Cup), which has been inviting researchers to train their robots to play soccer games for decades. “We want to enable quadrupedal robots to also attain this ability,” the statement reads. “Human legs are not only for locomotion but can also be used for manipulation like playing soccer.”
Zhongyu Li, one of the researchers who carried out the study,
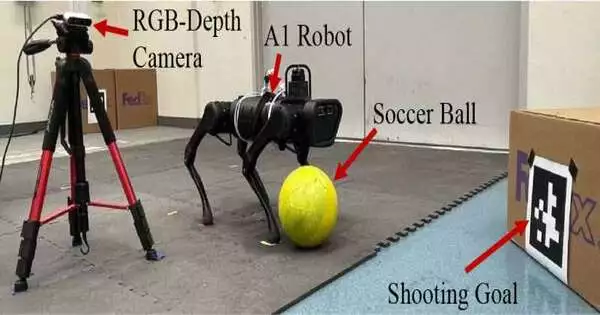
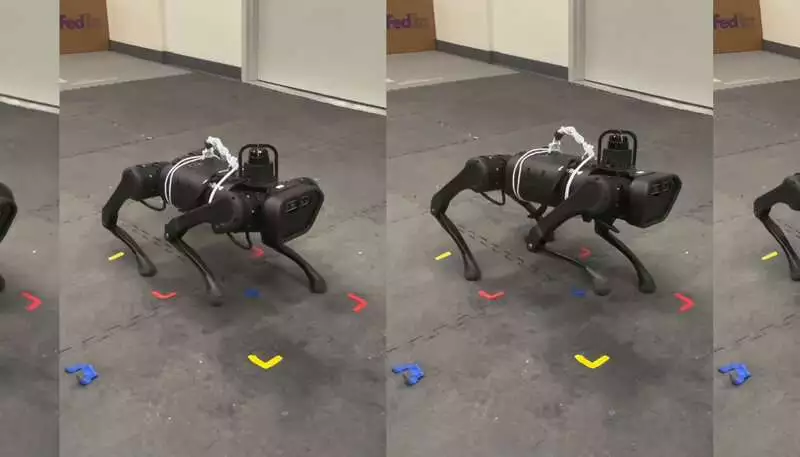
The new system has two key parts: a movement control strategy and a movement arranging strategy. The movement control part permits the robot to follow an erratic direction for the toe on its kicking leg. The movement arranging strategy, then again, chooses an ideal toe direction to shoot a close-by soccer ball (identified by an outer camera) to an objective area (e.g., the goal line).
“Our plan permits us to decouple the test of the exact soccer shooting task into two subtasks: control and arranging,” Li said. We can initially zero in on preparing a strong control strategy that can deal with the equipment, then re-utilizing such a regulator to get familiar with the arranging system. “To exactly shoot the ball to focus in reality, the organizer is prepared to utilize this present reality information when the robot is shooting the genuine soccer ball.”
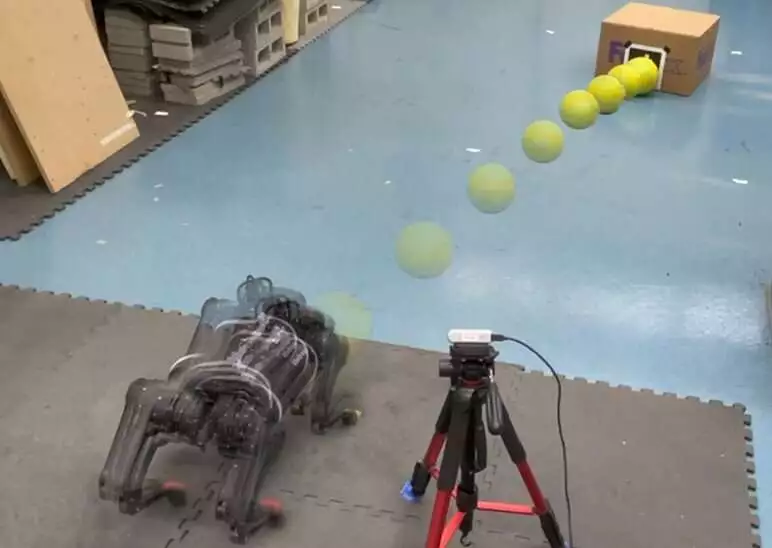
Li and his partners tried their system in a progression of genuine tests, utilizing an A1 quadruped robot. They discovered that it enabled the robot to shoot a deformable soccer ball with high accuracy at irregular targets.This is an intricate errand to handle, as the need might arise to swing its kicking leg rapidly and pick up speed without losing its equilibrium.
“The soccer ball presents more difficulties on the grounds that the robot needs to manage not just the hard-to-show delicate contact with the deformable ball, but in addition the vulnerabilities of the moving rubbing between the ball and the ground,” Li said. “The system we created to resolve such issues could be possibly helpful for errands where dynamic robots, like legged robots, need to connect with delicate items, like balls, ropes, chains, garments, and so on.”
Later on, the system made by this group of analysts could be utilized to work on the exhibition of robots in soccer competitions, especially Robocup. In the meantime, Li and his colleagues plan to develop various systems and AI models to work on the exhibition of robots in various components of soccer.
“Our drawn out objective is to foster quadrupedal automated soccer players that might one day at any point rival people,” Li added. “We are developing more perplexing soccer abilities utilizing quadrupedal robots, and ideally, soon we can begin a completely independent soccer match utilizing quadrupedal robots.”





{kind=link}