Nature is the essential wellspring of motivation for the majority of existing automated frameworks, intended to reproduce the appearance and conduct of different living creatures. By misleadingly duplicating organic cycles, these robots can assist with handling complex certifiable issues all the more effectively.
Specialists at Zhejiang Sci-Tech College and the College of Essex fostered a robot propelled by mantis shrimp that could assist with investigating and screening slender submerged conditions that are occupied by various creature species and plentiful in mineral assets. This bio-motivated robot was introduced in a paper distributed in IEEE/ASME Exchanges on Mechatronics.
“Numerous submerged conditions have thin spaces that are hard to access for people; hence, it would be ideal for robots to assume control over their investigation,” Pack Chen, one of the creators of the paper, told Tech Xplore. “Mantis shrimp is an adaptable and quick-swimming little hunter in the marine climate, and its magnificent movement capacity can give new examination thoughts to the improvement of submerged robots. This work takes mantis shrimp as the bionic item, plans another mantis shrimp robot, and finishes its movement control.”
“Many underwater environments have narrow spaces that humans find difficult to access, so it would be ideal for robots to take over their exploration. The Mantis shrimp is a flexible and fast swimming small predator in the marine environment, and its excellent motion ability can provide new research ideas for the development of underwater robots. This research uses mantis shrimp as the bionic object, creates a new mantis shrimp robot, and completes its motion control.”
Gang Chen, one of the authors of the paper.
Propelled by the capacities and developments of mantis shrimp, Chen and his associates set off to recreate them falsely. Their expectation was to foster a submerged robot that could move amazingly well submerged, impersonating the systems that help the development of mantis shrimp and, in this way, effectively getting to limit spaces submerged.
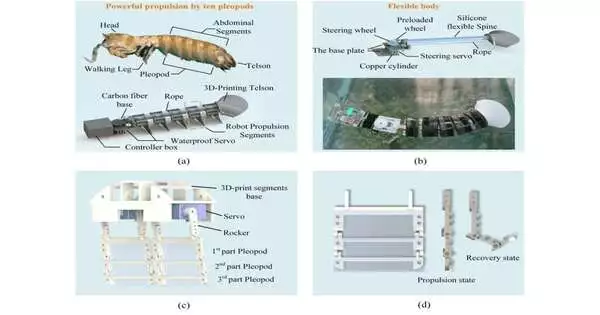
The nimble robot made by the specialists, comprising 10 fake pleopods and an adaptable body, has serious areas of strength for its capacities. Pleopods are the fork-molded appendages connected to the collection of scavangers, which permit the creatures to move around in water.
“The bionic mantis shrimp robot is driven by five sets of pleopods,” Chen made sense of. “An equilibrium between speed and security can be achieved by changing the development recurrence, sufficiency, and stage distinction of the movement of these five sets of pleopods. Also, the association of each set of pleopods is autonomous, which is extremely valuable for fixing in the event of primary harm submerged.”
The developments of the group’s robot are controlled through the twisting of its adaptable middle, utilizing a wire, alongside the development of its fake pleopods. On the whole, these components permit the robot to quickly change the place where it is turning, so it can swim in the ideal direction.
Turning movement examinations of the robot (a) one-turn test; (b) nonstop turning test. Credit: Chen et al. (IEEE/ASME Exchanges on Mechatronics, 2023).
“The numerous pleopods are repetitive, which can empower the robot to acknowledge turning in any event when a portion of the pleopods fizzle,” Chen said. “The bionic pleopod is planned with three joints, one of which is a functioning joint driven by a servomotor, and the excess two joints are uninvolved joints, which utilize the opposition of water to accomplish unfurling and collapsing.”
Basically, when one of the robot’s appendages moves in reverse, its three joints completely extend, prompting the greatest drive. Conversely, when the appendage gets back to its unique position, the joints crease, decreasing forward obstruction. This special plan uses the qualities related to the streaming of water to improve the robot’s design, increase its impetus limit, and make it simpler to control submerged
“The general design of the bionic mantis shrimp robot alludes to the organic mantis shrimp structure, and the robot body is level with a smoothed-out telson to really lessen drag,” Chen said. “The pleopod and body of the robot embrace an unbending, adaptable coupling plan to lessen the effect of water on the robot and work on the dependability of the robot in submerged movement.”
The analysts tried a model of their mantis shrimp robot and found that it could move well submerged, arriving at a maximum speed of 0.28 m/s and a base turning range of 0.36 m. These outcomes feature the capability of the robot to handle investigation missions in tight and complex submerged conditions.
Outstandingly, both the speed and development of the mantis shrimp robot can be unequivocally and handily controlled, decreasing the risk of crashes with submerged obstructions. The specialists currently plan to foster their framework further, with the expectation that it will ultimately be utilized to screen and save marine conditions.
“Later on, we will zero in on the most proficient method to acknowledge independent development of the bionic mantis shrimp robot in a thin submerged climate to finish the discovery task in this climate,” Chen said.
“We intend to upgrade the construction, shape, and equipment framework plan of the robot to work on its six-level of-opportunity movement capacity in 3D space and higher submerged movement speed. Then, the IMU, camera, profundity sensor, and other data-securing gadgets will be expanded to accomplish more exact shut-circle movement control of the robot through the investigation of ecological data and the input change of its own stance.”
While the group’s robot previously accomplished empowering results, it is currently in the beginning phase of advancement. Chen and his associates will presently proceed to improve and test their robot to discover its capacity to explore squeezed, submerged conditions.
“In our next examinations, we will likewise improve the toughness and unwavering quality of every one of the robot’s parts, utilizing carbon fiber and implanted high-strength materials,” Chen added. “This could establish the groundwork for viable applications in bound submerged conditions.”
More information: Gang Chen et al, Design and Control of a Novel Bionic Mantis Shrimp Robot, IEEE/ASME Transactions on Mechatronics (2023). DOI: 10.1109/TMECH.2023.3266778




