While most robots are first tried in lab settings and other controlled conditions, they are intended to be sent in genuine conditions, assisting people with handling different issues. Exploring genuine conditions involves managing elevated degrees of vulnerability and unusualness, especially when robots are finishing missions collectively.
As of late, PC researchers have been attempting to foster structures and models that could work on the capacity of robots to actually take care of issues beyond lab settings, where they are bound to experience unanticipated difficulties. These computational instruments could eventually work with the boundless reception of robots, upgrading their capacity to finish missions effectively.
An examination group at Johns Hopkins College as of late acquainted itself with another system planned to plan the activities of robots in a group while likewise considering the vulnerability under which they are working. Their proposed approach, presented in a paper pre-distributed on ArXiv, expands on a computational technique originally presented in one of their past works.
“Planning under uncertainty is a fundamental challenge in robotics. The challenge is worsened for multi-robot teams since the planning problem can soon become computationally intractable as the number of robots increases. Using heterogeneous multi-robot teams, we present a novel technique to planning under uncertainty.”
Cora A. Dimmig, Kevin C. Wolfe and their colleagues wrote in their paper.
“Arranging under vulnerability is a central test in mechanical technology,” Cora A. Dimmig, Kevin C. Wolfe, and their associates wrote in their paper. “For multi-robot groups, the test is additionally exacerbated since the arranging issue can immediately turn out to be computationally immovable as the quantity of robots increases. We propose an original methodology for arranging under vulnerability utilizing heterogeneous multi-robot groups.”
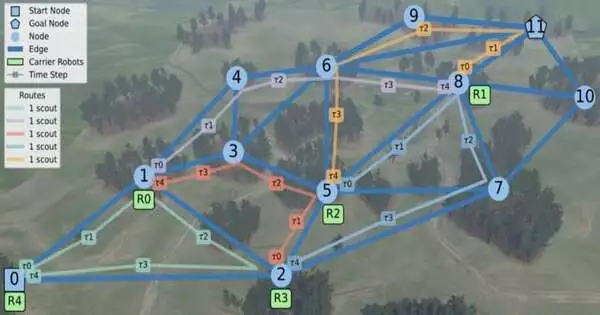
The methodology proposed by Dimmig, Wolfe, and their colleagues applies to situations in which various robots in a group can take on various jobs, as every one of the robots by and large works to finish a typical mission outside. Basically, the group presents the thought that a few robots, which move at higher velocities, could go about as scouts during a given true mission, watching obscure or unsure geological locales ahead to recognize possible difficulties and better arrange the activities of the multitude of different robots.
“This empowers examining both wanting to limit the gamble related to vulnerability in proposed ways as well as intending to limit the general vulnerability in the climate,” the specialists made sense of in their paper.
The technique for arranging the activities of robot groups presented by Dimmig, Wolfe, and their partners depends on two primary programming draws, specifically the making of a powerful topological diagram, thus called blended whole number programming. The group’s methodology includes the sending of two unique sorts of robots. The principal type is entrusted with finishing missions, while the second scouts the conditions to gather information and decrease vulnerability, working with an errand’s culmination.
Up to this point, the analysts have assessed their methodology computationally on different potential situations that could present vulnerability during certifiable missions. Their discoveries were promising, recommending that their proposed technique could assist with working on the presentation of robot groups on undertakings that contain differing levels of vulnerability.
“We test our methodology in various agent situations where the robot group should travel through a climate while limiting recognition within the sight of unsure onlooker positions,” the scientists wrote. “We exhibit that our methodology is adequately computationally manageable for ongoing rethinking in evolving conditions, can further develop execution within the sight of defective data, and can be acclimated to oblige different gamble profiles.”
Later on, the new methodology created by Dimmig, Wolfe, and their teammates could be tried further, utilizing both reenacted and actual robots to confirm its true capacity. Also, this new work could move other exploration groups to foster comparative strategies to upgrade the presentation of robots in complex true conditions, at last working with their enormous scope organization.
More information: Cora A. Dimmig et al, Uncertainty-Aware Planning for Heterogeneous Robot Teams using Dynamic Topological Graphs and Mixed-Integer Programming, arXiv (2023). DOI: 10.48550/arxiv.2310.08396




