For quite a long time, specialists have been attempting to foster robots that can effectively help people and work close by them as they tackle an assortment of regular assignments. To do this successfully, in any case, the robots ought to have the option to collaborate normally with people, including giving and receiving objects from them.
Analysts at NVIDIA have as of late fostered a model that could be utilized to improve the capacity of robots to pass and get objects from human specialists normally. This methodology, described in a paper to be introduced at ICRA 2022, depends on a system called STORM, which they introduced in one of their past works.
“In this work, we center explicitly around ensuring that robots can take any article from a human client,” Dieter Fox, one of the scientists who did the review, told TechXplore. “We thought of an answer that coordinates a learned methodology for getting a handle on with our prescient control approach, to guarantee these handovers are unsurprising, regular, and quick, so that individuals consider the robot to be a protected, supportive colleague.”
Fox and his partners at NVIDIA have been dealing with working on the control and communication abilities of robots for quite a while at this point. The design of the model introduced in their new paper, nonetheless, varies from the methodologies introduced in their past works.
All the more explicitly, their recently introduced approach uses a learned model to foresee multiple manners in which the robot could take an item from a human specialist’s hand. Then, rather than utilizing a straightforward rule-based calculation to figure out which of these ways is more powerful, it distinguishes the ideal methodology by utilizing STORM, the model prescient control (MPC) system recently developed by the group.
“In this work, we focus primarily on ensuring that robots can steal any object from a human user. We devised a system that combines a learning grasping approach with our predictive control approach to ensure that these handovers are predictable, natural, and quick, so that people perceive the robot as a safe, helpful companion.”
Dieter Fox, one of the study’s researchers, told TechXplore.
Fox made sense of it. “Our MPC approach, named STORM, works by testing a wide range of potential movements the robot could make from the ongoing area to where the item is,” Fox said. It uses GPU calculations to assess these directions, permitting us to check 500 of them in equal time.
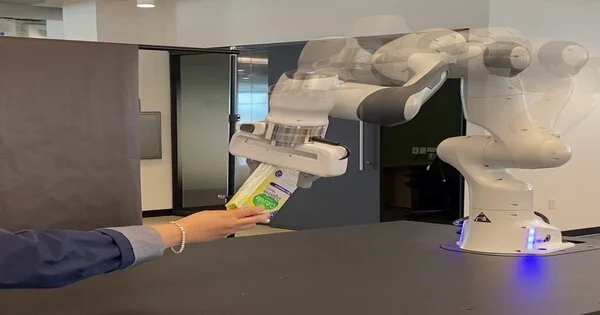
The scientists propose a human-robot handover framework that utilizes Model-Predictive Control (MPC) for movement age. This results in a more receptive and liquid human-robot handover experience compared to the earlier framework. Citation: Yang et al.
The model made by Fox and his associates refreshes the robot’s control choices a few times each second. This at last permits it to rapidly adjust the robot’s arranged direction and its choices about where to get a handle on objects in view of the developments made by the client it is teaming up with.
“This work demonstrates the way that we can consolidate learned objects, get a handle on them, and human following procedures with effective movement, wanting to create strong, solid, and normal robot conduct,” Fox said. “It gives an establishment the ability to construct a wide range of human-robot cooperative ways of behaving.”
Fox and his partners assessed their model’s presentation in a progression of tests where robots gave over and got an assortment of items while connecting with four human clients. In these tests, their methodology accomplished extremely encouraging outcomes, as practically every one of the members felt that the robot was better at teaming up with them when fueled by the scientists’ MPC system than when it depended on a pattern approach.
Later on, the new model presented by this group at NVIDIA could be utilized to work on the exhibition of both existing and recently created robots on undertakings that include the control of items in a close coordinated effort with human specialists. In the mean time, the group intends to foster different instruments to improve human-robot joint efforts.
The analysts propose a human-robot handover framework that utilizes Model-Predictive Control (MPC) for movement age. This results in a more responsive and liquid human-robot handover experience compared to the earlier framework. Citation: Yang et al.
Fox added that approaches like this that consolidate the force of profound learning with application-based thinking will be helpful for some applications. “In our next examinations, we might want to investigate more broad human-robot cooperative frameworks to enable the robot to work with people effectively while likewise investigating the chance of preparing these robot frameworks basically in mimicked conditions and conveying the prepared models to genuine robots.”





{kind=link}