Scientists at the Specialized College of Munich (TUM) have created independent driving programming that conveys risk in the city in a fair way. The calculation contained in the product is viewed as the first to consolidate the 20 moral proposals of the EU Commission master bunch, hence pursuing altogether more separated choices than past calculations.
The activity of robotized vehicles is to be made altogether more secure by surveying the changing levels of hazard to walkers and drivers. The code is accessible to the overall population as open-source programming.
The main barrier to overcome before autonomous driving vehicles can be permitted in the city for a wide range is specialized recognition.Moral considerations play an important role in the development of the corresponding calculations: programming must be able to deal with unexpected circumstances and make critical decisions in the event of an impending mishap.
“Until date, established ethical theories were frequently considered in order to infer morally permissible actions made by autonomous cars. This eventually led to a dead end, because in many traffic circumstances, the only option was to violate one ethical principle,”
Franziska Poszler, scientist at the TUM Chair of Business Ethics.
Scientists at TUM have now developed the main moral calculation to decently convey the degrees of hazard instead of working on an either-or rule. Around 2,000 situations, including basic ones, were conveyed across various types of roads and areas such as Europe, the United States, and China.The exploration work distributed in the Nature Machine Knowledge diary is the joint consequence of an organization between the TUM Seat of Car Innovation and the TUM Seat of Business Morals at the TUM Foundation for Morals in Man-made Reasoning (IEAI).
Maximilian Geisslinger, a researcher at the TUM Seat of Car Innovation, makes sense of the methodology: “As of recently, independent vehicles were constantly confronted with an either/or decision while experiencing a moral choice.” However, road traffic cannot be separated into obvious, high-contrast situations; the endless dim in the middle must also be considered.”Our calculation weighs different dangers and pursues a moral decision from among many potential ways of behaving—and does so in a fraction of a second.”
More choices in basic circumstances
A specialist board defined the essential moral boundaries on which the product’s risk assessment is based in a written proposal for the EU Commission in 2020.The proposal incorporates critical standards, for example, the requirement for the worst-case scenario and the equitable distribution of chance among all street clients. To translate these standards into numerical estimates, the exploration group ordered vehicles and people moving in road traffic based on the risk they pose to other people and their individual ability to face challenges.
A truck, for example, can cause serious harm to other road users while causing minor harm to the truck itself in many cases.The inverse is the situation for a bike. In the following stage, the calculation was told not to surpass the greatest OK gamble in the different separate road circumstances. Also, the examination group added factors to the estimation that represent liability with respect to the traffic members, for instance, the obligation to submit to traffic guidelines.
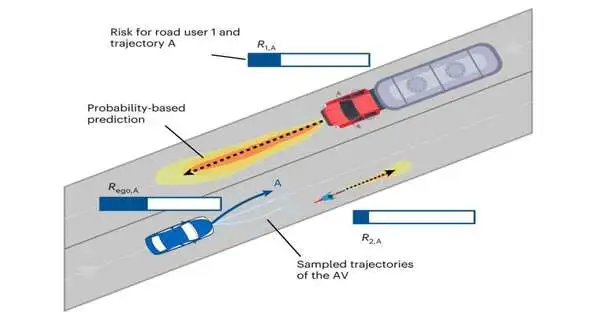
Past methodologies treated basic circumstances in the city with just a few potential moves; in hazy cases, the vehicle essentially halted. The gamble appraisal currently coordinated in the analysts’ code brings about additional potential levels of opportunity with less gamble for all. A model will show the methodology: An independent vehicle needs to surpass a bike while a truck is moving toward the approaching path. Every piece of current information on environmental factors and individual members is currently being used.
Could the bike ever be passed without driving in the opposite direction of the vehicles while maintaining a safe separation from the bike? What is the gamble presented to each separate vehicle, and what hazards do these vehicles comprise for the independent vehicle itself? In hazy cases, the independent vehicle with the new programming generally holds on until the gamble for all members is OK. Forceful movements are avoided, while the independent vehicle does not suddenly freeze and jam on the brakes. Indeed and no are immaterial, supplanted by an assessment containing countless choices.
“The sole thought of customary moral hypotheses brought about an impasse.”
“As of recently, frequently customary moral hypotheses were examined to infer ethically passable choices made via independent vehicles.” “This at last prompted an impasse, since in many rush hour gridlock circumstances there could have been no other option than to disregard one moral rule,” says Franziska Poszler, researcher at the TUM Seat of Business Morals. “Conversely, our system puts the morals of hazard in the middle.” This allows us to consider probabilities and make more differentiated assessments.”
The analysts stressed the way that even calculations that depend on risk morals—ddespite the fact that they can pursue choices in view of the basic moral standards in each conceivable rush-hour gridlock circumstance—aactually can’t ensure mishap-free road traffic. Later on, it will also be important to consider further separations, such as social contrasts in moral direction.
As of recently, the calculation created at TUM has been approved for recreations. Later on, the product will be tested on the road utilizing the examination vehicle EDGAR. The code typifying the discoveries of the examination exercises is accessible as open-source programming. TUM is thus contributing to the improvement of suitable and safe independent vehicles.
More information: Maximilian Geisslinger et al, An ethical trajectory planning algorithm for autonomous vehicles, Nature Machine Intelligence (2023). DOI: 10.1038/s42256-022-00607-z





{kind=link}