
A threesome of delicate mechanical technology specialists at Fondazione Istituto Italiano di Tecnologia, in Italy, working with a partner from the College of Montpellier, in France, has fostered a remarkable sort of robot that 3D prints its own body as a way to develop longer. In their paper distributed in the journal Science Advanced Mechanics, the gathering depicts how they made their robot and the potential purposes for it.
As science and innovation keep on developing, researchers track down clever ways of joining advancements into new sorts of innovation. In this new endeavor, the exploration group joined mechanical technology with 3D printing, bringing about the production of another sort of robot that can develop longer voluntarily.
An added substance fabricating-based developing robot executes climbing plant-propelled ways of behaving to empower the route of unstructured conditions. Credit: IIT-Istituto Italiano di Tecnologia
The robot is formed like a snake and has a head that twists. As the head turns, it makes more weight behind it utilizing 3D printing, bringing about lengthening of the robot. The robot can likewise be customized to fill in desired directions, for example, toward light or against gravity. This enables the robot to fill in a plant-like way. The group has named their robot FiloBot.
FiloBot has a cylinder inside the body that takes care of the head, which contains 3D printer ink, a sort of plastic. The head then prints in a pivoting design, winding body material behind it. On the far edge, at the back of the robot, is a base holding the inkwell, a siphon, and a power source.
Inside the head, alongside the printer, are gadgets that answer signals from sensors on an outside piece of the head. Contribution from the sensors is utilized to control the result of the printer—it can accelerate or slow its pace of twist and how much ink is provided. This considers controlling the direction of development.
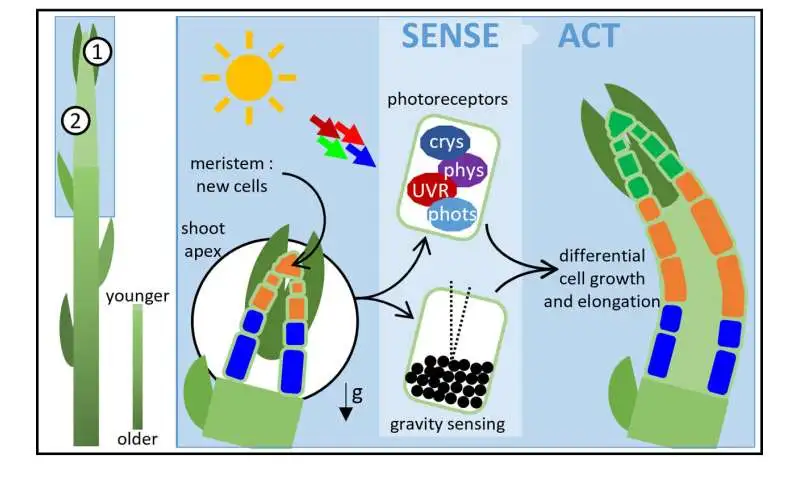
Simplified representation of the growth zones, their functions, and growth responses. The shoot apex comprises layers of cells that constitute the meristematic part (point 1) and the cell elongation region (point 2). Photoreceptors and gravity- sensing cells are distributed within the shoot apex. Perception of external signals is thus localized in the apical part, where actuation is also implemented. Processing of an external stimulus dictates cell growth, elongation, and the resulting orientation of the shoot. In the example, photo-perception defines the shoot movement toward light merged with gravity perception against gravity. Credit: Science Robotics (2024). DOI: 10.1126/scirobotics.adi5908
The scientists recommend that potential purposes for their robot incorporate observing or, in any event, cooperating with unstructured (regular) habitats or building independent designs. It could likewise be utilized to screen scenes to assess the probability of torrential slides or avalanches and test contamination levels in hard-to-reach regions.
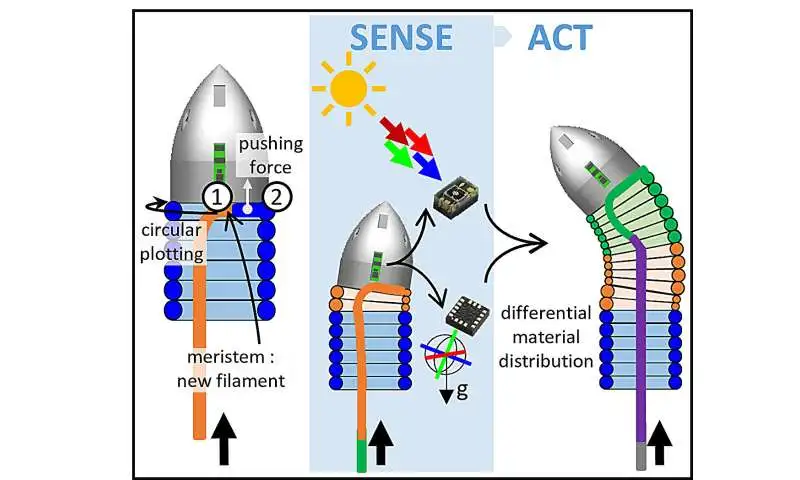
Schematic representation of the growing robot regions, their functionalities, and growth responses. Analogous to the shoot apex, the robot comprises sensing elements and a material deposition region localized at its head (points 1 and 2). In the meristem- like region, there is the addition of material and the generation of forces needed to propel the tip forward. Control of the plotting defines either a lower or higher material layer along the stem axis analogous to differential cell division and elongation. In analogy with the biological model, the robot processes sensory inputs and defines a differential material deposition both toward light and against gravity. In both the natural and artificial models, the already grown part of the body no longer moves or reorientates with respect to the environment. Credit: Science Robotics (2024). DOI: 10.1126/scirobotics.adi5908
More information: Emanuela Del Dottore et al, A growing soft robot with climbing plant-inspired adaptive behaviors for navigation in unstructured environments, Science Robotics (2024). DOI: 10.1126/scirobotics.adi5908




