Two new methods that could help improve the ability of legged robots to move on rocky or difficult terrains have recently been introduced by researchers at Carnegie Mellon University (CMU)’s Robomechanics Lab. These two strategies, which are described in a paper that has already been pre-published on arXiv, are modeled after how animals’ tails move and their innate proprioception abilities.
“Our paper aims to bring legged robots from ideal lab environments into real-world environments, where they may encounter challenging terrains such as rocky hills and curbs,” Yanhao Yang, one of the researchers who conducted the study, told Tech Xplore. “In order to accomplish this, we drew inspiration from both engineering concepts and animal behavior.”.
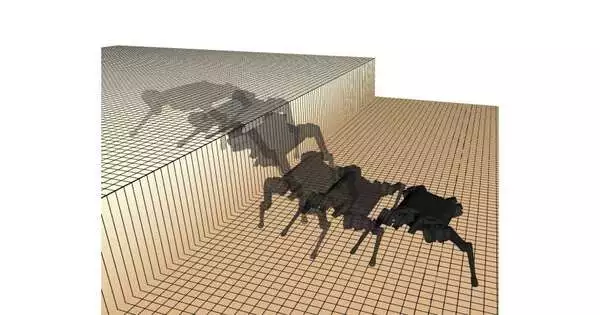
In order to ground themselves and maintain their stability on various surfaces, many animals, including cats and other felines, are known to walk along their own footprints. By combining motion planning and proprioception techniques, Yang and his colleagues attempted to replicate this behavior in robots.
“The primary benefit of this system is that it is more resistant to environmental noise such as obstacles, reflections, or lighting conditions.” When proprioception detects an accident, the task is to make accurate control and planning judgments under ambiguity.”
Yanhao Yang, one of the researchers who carried out the study,
By gathering data about their own body’s position, actions, and location, the methods they used enable robots to “sense” the environment and move more dependably. Proprioception is a skill that gets around the limitations of computer vision systems, which include sensor noise, environmental obstacles, light reflections from nearby objects, and poor lighting.
Although proprioception is a sense that humans and animals have from birth, the majority of current robots use the information that vision systems provide to understand their surroundings. Yang and his colleagues suggest utilizing data gathered by sensors integrated inside the robot, such as motors, encoders, and inertial measurement units, rather than vision systems, which rely on cameras, lidar technology, and other external sensors.
This enables the robot to recognize when it stumbles or falls and correct its posture to prevent toppling, according to Yang. “This system’s main benefit is that it can withstand more environmental noise, such as obstacles, reflections, or lighting conditions. When the proprioception detects an accident, the challenge is to make accurate control and planning decisions in the face of uncertainty.”.
The researchers also developed a computational model that enables robots to control a synthetic tail in a manner similar to how animals move their tails when navigating environments, in addition to their proposed proprioception system. Squirrels and cats are two examples of animals that use their tails to maintain balance when jumping or hopping onto surfaces.
When asked why most robots lack tails, Yang responded, “We noticed that animals use their tails to help with their agile locomotion. For instance, cheetahs use their tails to achieve rapid acceleration, deceleration, and quick turns, while squirrels use their furry tails to balance when jumping between branches. We modified this concept by adding a tail to our quadruped robots, which aids in balance when the robot misses a foothold or falls off.
Yang and his coworkers also developed a control system that enables a legged robot’s artificial tail to work in concert with its legs, assisting it in maintaining its balance even when one or more of its legs are raised off the ground. In addition to increasing the robot’s efficiency in tight or cramped spaces, this can significantly improve its navigation in difficult or uneven terrain.
Through a series of simulations, Yang and his colleagues tested various motion planning strategies. Their results are very encouraging because they reduced unexpected slips and falls while also enhancing the dependability of movement in challenging and shifting terrains for simulated legged robots using bio-inspired proprioception and tail control techniques.
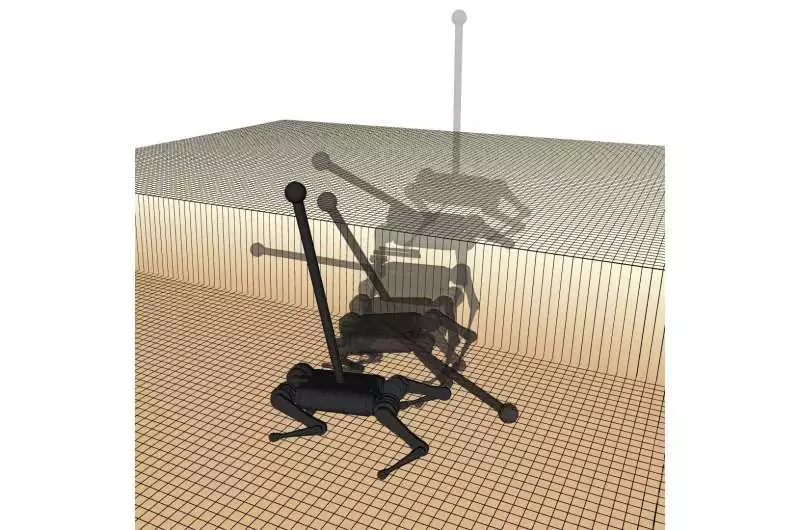
By including a tail that aids in body balance when the legs are off the ground, the suggested method further enhances the robot’s ability to traverse difficult terrain. To maximize efficiency within the constrained rotation angles, the controller generates a conic motion for the tail. Credit: Yang et al, Robomechanics Lab at CMU.
Real-leg robots could be used to test and implement these new motion planning techniques, which might improve their ability to navigate difficult environments safely while lowering collision and fall rates. This might improve the ability of these robots to successfully carry out search and rescue missions, environmental monitoring operations, and other real-world tasks that require moving over uneven or difficult terrain.
Testing our suggested method on actual hardware is one of our main objectives for future research, according to Yang. This will be difficult because we must precisely estimate the state and contact data, which are essential for the robot’s proprioception and control.
Yang and his coworkers also intend to enhance the way their framework simulates and manages robot tails in their upcoming works. This may further lessen collisions, such as those involving the tail and other areas of the robot’s body or the surrounding environment.
Extending the method to more challenging terrains, like stepping stones or narrow ravines, is another area that needs improvement, Yang continued. “At the moment, our method assumes fairly straightforward terrain variations, but on more difficult terrains, the robot’s legs might trip or hang. Our controller will still attempt to lower the robot’s body in these circumstances to maintain stability, but we can make this even better by including more events in the gait planning process.”.
More information: Yanhao Yang et al, Proprioception and Tail Control Enable Extreme Terrain Traversal by Quadruped Robots, arXiv (2023). DOI: 10.48550/arxiv.2303.04781





{kind=link}