Mechanical frameworks propelled naturally can serve to productively handle many issues, going from exploring complex conditions to consistently finishing missions collectively. As of late, roboticists have developed a number of bio-propelled frameworks intended to recreate the body construction and development of different creatures, including snakes.
Snake-like robots could enjoy different upper hands over different frameworks with more regular body structures. Because of their adaptable bodies and sliding movements, they could arrive at little and restricted regions that would somehow or another be hard to access, for example, moving inside lines, mines, and in other testing conditions.
“Snake robots have been widely used in difficult environments such as confined spaces, but most existing snake robots with large length/diameter ratios have low stiffness, which limits their accuracy and utility. To address this, this paper proposes a novel’macro-micro’ structure helped by a new comprehensive stiffness regulation technique.”
Nan Ma, Haqin Zhou and their colleagues wrote in their paper.
Regardless of their true capacity, up to this point, snake robots have not been effectively sent for an enormous scope. This is to some degree because of the challenges experienced while attempting to successfully regulate these frameworks’ firmness, permitting them to perform desired movements and arrive at target positions with high accuracy.
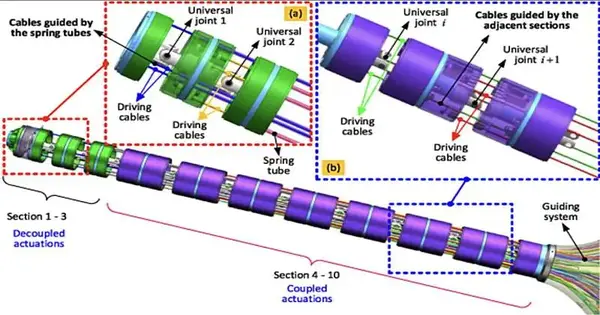
Scientists at Lancaster College, the Beijing Establishment of Innovation, and the North China College of Innovation have as of late decided to foster another plan procedure that could assist with improving the solidity of snake robots. Their proposed technique, illustrated in the diary Bioinspiration and Biomimetics, was applied to the improvement of a snake-like mechanical arm with 20 levels of opportunity (DoF).
“Snake robots have been generally utilized in testing conditions, like restricted spaces,” Nan Mama, Haqin Zhou, and their partners wrote in their paper. “Notwithstanding, most existing snake robots with huge length/width proportions have low firmness, and this restricts their exactness and utility. To cure this, a novel ‘large-scale miniature’ structure supported by another complete solidity guideline technique is proposed in this paper.”
The full-scale miniature design formulated by this examination group can advance the positional precision of snake-like robots as they explore restricted spaces, both above and below the ground. This construction is joined by a recently evolved, thorough methodology to control the robot’s firmness, as well as a kinetostatic model intended to gauge mistakes.
“The inward rubbing, variety of link solidness as a component of strain, and their impacts on the primary firmness of the snake arm under various setups have been integrated into the model to expand the demonstrating precision,” Mama, Zhou, and their partners composed. “At last, the proposed models were approved tentatively on an actual model and control framework (blunder: 4.3% and 2.5% for straight and bended setups, separately).”
Mama, Zhou, and their partners utilized their proposed plan to foster a model framework, which they then assessed in a progression of beginning tests. Their discoveries were exceptionally encouraging, as their system empowered them to change the strain of the links driving the snake-like arm’s movements by a normal of 183.4%.
Later on, this new review could illuminate the improvement regarding better-performing snake-enlivened mechanical frameworks, which can be regulated with more noteworthy accuracy and can hence achieve better total missions in complex and profoundly restricted conditions. These robots could end up being unquestionably significant for helping human specialists during search and salvage tasks, to screen underground conditions, and for incalculable other high-level genuine applications.
More information: Nan Ma et al, Comprehensive stiffness regulation on multi-section snake robot with considering the parasite motion and friction effects, Bioinspiration & Biomimetics (2023). DOI: 10.1088/1748-3190/ad0ffc




