
Concurrent limitation and planning (Hammer) is a promising innovation that can be utilized to work on the routes of independent frameworks, assisting them with planning their general climate and tracking different items inside it. Up to this point, it has basically been applied to earthly vehicles and portable robots, but it could likewise possibly be extended to rockets.
Scientists at the Georgia Foundation for Innovation (Georgia Tech) and the NASA Goddard Space Flight Center recently made AstroSLAM, a hammer-based calculation that could permit rockets to explore more independently. The new arrangement, presented in a paper pre-distributed on arXiv, could be especially helpful in cases where space frameworks are exploring around a little divine body, like a space rock.
“Our new work is important for a NASA-financed ESI (Beginning Phase Developments) program whose goal was to make future rockets bound for profound space missions (e.g., visiting and reviewing space rocks) more independent,” Panagiotis Tsiotras, one of the scientists who did the review, told TechXplore.
“Our new work is part of a NASA-funded ESI (Early-Stage Innovations) program whose goal was to make future spacecraft destined for deep-space missions (e.g., visiting and surveying asteroids) more autonomous,”
Panagiotis Tsiotras, one of the researchers who carried out the study,
“This issue is of extraordinary interest since, inferable from the huge goodwill from Earth, executing the expected moves around the space rock in an ongoing manner is troublesome. All things considered, the ongoing system requires a huge group of human administrators on the ground to downlink the pictures caught from the rocket and to examine them disconnected to make computerized landscape maps, which adds up to painstakingly arranging the shuttle moves.”
Guaranteeing that rockets move in the desired ways around space rocks is a difficult, dreary, and tedious errand for human specialists on the planet. A model that can independently remake the state of neighboring space rocks and explore the rocket with negligible mediation from Earth would hence be staggeringly important, as it could work with and possibly accelerate profound space missions.
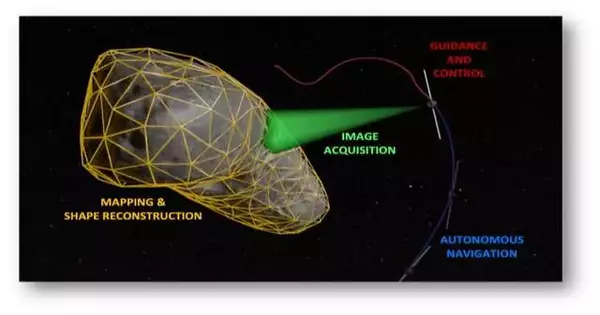
Tsiotras and his colleagues’ arrangement, AstroSLAM, can independently produce the area and direction of the rocket in comparison to that of adjacent space rocks or other small divine bodies.It accomplishes this by examining a grouping of pictures taken from a camera installed on the rocket as it is circling the divine collection of interests.
“AstroSLAM, as its name proposes, depends on Hammer, a system that has so far been utilized with extraordinary outcomes in earthly portable robots, yet we have not reached out to the space climate,” Tsiotras made sense of. “Our model can also create a 3D shape representation of small divine bodies and estimate their size and gravitational boundaries.””The calculation is the culmination of over five years of work in my group, the Elements and Control Frameworks Lab at Georgia Tech, on vision-based relative routes for rockets.”
Independent tasks in the vicinity of a divine little body.
AstroSLAM can independently determine the general position and direction of a rocket. This data can then be utilized to design and execute different moves in a circle, remembering to arrive at a nearby divine body. The model can likewise create pictures of the 3D state of the nearby divine body, assessing its size and gravitational boundaries.
“One of the oddities of AstroSLAM is that it considers the movement imperatives coming from the orbital elements, hence giving a considerably more exact route arrangement,” Tsiotras said.
“AstroSLAM lessens a rocket’s dependence on the human ground team to run complex calculations, thereby expanding its independence and relative route capacities.” Regardless of whether we keep on depending on existing, very tried systems for years to come, the proposed approach can likewise act as a “backup” arrangement in the event that the essential methodology fizzles, as it depends on only a single camera.
The scientists assessed their innovation in a progression of tests, utilizing genuine information caught by NASA during heritage space missions and high-loyalty fake information created using a rocket test system at Georgia Tech. Their discoveries were extremely encouraging, proposing that AstroSLAM could ultimately empower the independent activity of rockets in different situations.
“We are presently dealing with further developing the picture handling step of AstroSLAM (e.g., notable element location and following) by utilizing a cutting-edge brain network design prepared on a huge data set of genuine pictures of space rocks from earlier NASA missions to identify more solid, striking surface highlights,” Tsiotras added. “Once coordinated with AstroSLAM, this work is supposed to build dependability and power against wrong estimations (anomalies) and troublesome light circumstances.”
Tsiotras and his partners are likewise attempting to allow the model to blend pictures from apparent light and infrared light to achieve far better exhibitions. At last, they wish to stretch out their way to deal with functional situations in which the pictures would be caught by various rockets in a circle simultaneously.
“Little divine bodies, like space rocks, comets, and planetary moons, are intriguing and logically important focuses for investigation,” said Kenneth Getzandanner, co-creator of the paper and flight elements lead for Space Science Mission Tasks at the NASA Goddard Space Flight Center.
“Missions to these items, however, present new challenges to the route and tasks due to the article’s small size and the extent of its annoying powers relative to gravity.” Recent small body missions, such as the Beginnings, Phantom Translation, and Asset ID—Security Regolith Pilgrim (OSIRIS-REx) at the close Earth space rock 101955 Bennu, embody these challenges and necessitate broad portrayal crusades and extensive grounding in the know connection. “Advances, for example, like AstroSLAM, are helpful for working on tasks, lessening dependence on ground resources and staff for close to constant activities, and empowering more aggressive mission ideas and close surface fights.”
More information: Mehregan Dor et al, AstroSLAM: Autonomous Monocular Navigation in the Vicinity of a Celestial Small Body—Theory and Experiments, arXiv (2022). DOI: 10.48550/arxiv.2212.00350





{kind=link}