Mechanical advances have opened energizing opportunities for space investigation, which might actually prompt new revelations about the divine bodies in our world. Robots have ended up being especially encouraging devices to investigate different planets, especially Mars, an earthly planet in the planetary group that is known to have comparable components to those tracked down on the planet.
The investigation of Mars and its surface is an intriguing mission, as it could reveal indications of past or present extraterrestrial life. As well as possibly divulging types of ancient microbial life, these investigations could prompt the disclosure of assets that exist beyond Earth, possibly preparing for future human missions to Mars.
Scientists at Nanjing College of Flying and Astronautics have recently developed another four-legged robot inspired by reptiles that could aid in the exploration of Mars’ surface.Their robot, presented in MDPI’s Biomimetics Diary, has an adaptable body structure that can repeat a desert reptile’s development and motion style.
“Specific sorts of planetary rovers have been created for carrying out activities on Mars’ surface to aid ambitious uncrewed missions to Mars,”
Guangming Chen, Long Qiao, Zhenwen Zhou, Lutz Richter and Aihong Ji wrote in their paper.
“To help aggressive uncrewed missions to Mars, explicit sorts of planetary wanderers have been created for performing errands on Mars’ surface,” Guangming Chen, Long Qiao, Zhenwen Zhou, Lutz Richter, and Aihong Ji wrote in their paper. “Because of the way that the surface is made out of granular soils and shakes of different sizes, contemporary wanderers can experience issues when continuing on delicate soils and moving over rocks.” To overcome such difficulties, this investigation fosters a quadruped crawling robot inspired by the motion qualities of the desert reptile.”
The biomimetic robot made by Chen and his partners has an adaptable spine-like design and four legs. To repeat the “crawling” movement normal for reptiles, each leg highlights two pivots and a step that evokes a swinging development.
Every one of the hip joints interfacing the spine structure with the robot’s legs is made of two servos and a four-linkage system that permits the robot to lift without losing its equilibrium. The robot’s “feet” have four adaptable “toes,” comprising two pivots and a paw.
“The leg structure uses a four-linkage system, which guarantees a consistent lifting movement,” the scientists made sense of in their paper. “The foot comprises a functioning lower leg and a round cushion with four adaptable toes that are viable in getting a handle on soils and shakes.”
To replicate reptile evolution, the scientists created a series of kinematics models for each of their robot’s parts.They then used these models and mathematical forecasts to design the robot’s evolution.
“To decide robot movements, kinematic models connecting with the foot, leg, and spine are laid out,” Chen and his partners wrote in their paper. “Also, the planned movements between the storage compartment spine and leg are mathematically checked.”
The scientists at first assessed their robot in a progression of recreations to decide if it could really repeat the developments of reptiles. Their outcomes were extremely encouraging, as they found that their robot could play out the ideal movements and strolling style.
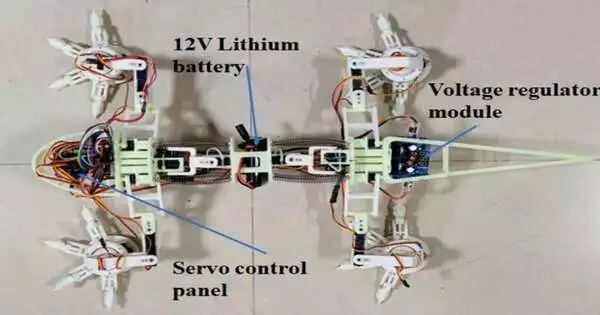
Chen and his partners have previously made a model of their robot utilizing 3D-printed tar materials, a servo control board, a lithium battery, and other electronic parts. They then used a simulation testbed to evaluate their model robot’s performance on rough surfaces that resembled Mars’ terrain.
They found that the robot could really move in rough conditions, showcasing its true capacity for future missions on the red planet. However, before it is sent and tested outside the lab, the group should develop it further, such as by adding a defensive fixing structure that would shield it from soil or airborne residue and building its body with more safe materials.
Chen and his partners are currently dealing with AI models that would permit their robot to adapt its developments to various landscapes. Moreover, they intend to present a framework that would give the robot a nonstop power supply.
More information: Guangming Chen et al, Development of a Lizard-Inspired Robot for Mars Surface Exploration, Biomimetics (2023). DOI: 10.3390/biomimetics8010044