Late mechanical advancements have paved the way for the development of increasingly refined automated frameworks designed to independently complete missions in a variety of natural and novel environments.Robots intended to work in uncertain or distant conditions could significantly profit from the capacity to obtain electrical power from their environmental factors effectively.
Scientists at the Worcester Polytechnic Foundation, the Royal School of London, and the University of Illinois at Urbana-Champaign have recently developed another mechanical framework that can externally modify its environmental factors to get the most energy from a given power source.This robot, introduced in a pre-distributed paper on arXiv and set to be introduced at the IEEE Worldwide Gathering on Mechanical Technology and Biomimetics, works by drawing electrical circuits utilizing conductive ink.
“Our PLOS ONE work got going as a very philosophical psychological test,” Andre Rosendo, the teacher who completed the review, told TechXplore. “Nietzsche guarantees that man’s base impulse is power, and endurance is only a condition sine qua non. We were unable to arrive at that last objective. In light of this thought, we began to devise exploratory settings where our robot couldn’t act to make due, yet to flourish. “
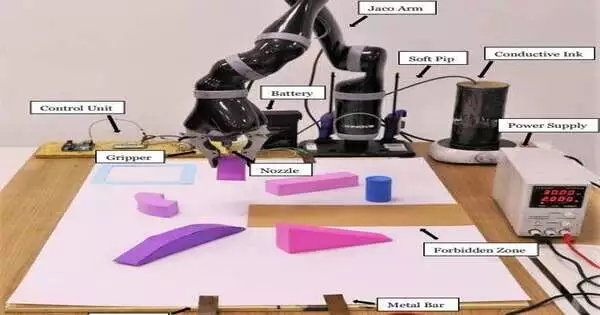
In their most memorable review, zeroing in on this subject, Andre Rosendo, Xianglong Tan, and Weijie Lyu attempted to devise a framework that could drive itself simply by painting electric circuits. In their new work, they joined this circuit printing framework with a mechanical gripper, making a robot that can play out a collection of activities pointed toward accomplishing more prominent power (i.e., higher voltages) from its current circumstance and hence get by in negative conditions.
The group tried their robot in reenactments of various genuine situations, remembering assignments for which it needed to keep away from actual snags or locales that would end its drawn circuits. They then tested the robot in a controlled environment to assess its capabilities.
“Our robot begins each trial with a battery, and its energy supply depletes as it moves (we also ‘leak’ it to simulate natural energy losses owing to homeostasis),”
The student Xianglong Tan
“Our robot begins each trial with a battery, and its energy source diminishes as it moves (and we likewise “spill” it to copy regular energy misfortunes because of homeostasis,” the understudy Xianglong Tan made sense of. “The robot goes through a progression of virtual preparation episodes, with a red terminal (VCC) that should be associated with one more red terminal close to its body, and a dark terminal (Ground) that needs to match the dark one so the current can stream towards its battery.”
To keep their robot from essentially moving in a basic straight line, Rosendo and his partners added hindrances in its environmental factors, both in recreated and certifiable preliminaries. Some of these hindrances, for example, foam solid shapes, could undoubtedly be taken out by the robots, while others were associated with an establishing plate that “sucked” the electrical power away when a circuit contacted it.
The group found that their robot quickly and really figured out how to beat these snags to make due and augment the energy they had. This implied adjusting obstructions or spanning regions in its environmental factors that it couldn’t attract.
“I think we are making strides towards more versatile ways of behaving for robots,” Rosendo said. People are built for adjusting, changing their ways of behaving to match the one expected in new circumstances, and gradually improving as their insight develops. We could be discussing sports, undertakings, or even space missions: prior to being large and in charge, we spend our underlying endeavors understanding the new standards to, later, improve and surpass.
The adjusting robot made by Rosendo and his partners could enjoy various benefits, as it can independently expand energy in its environmental factors and persistently keep itself utilitarian by making new electric circuits. Later on, this new work could promote the improvement of other automated frameworks that can get by and flourish in complex conditions without the requirement for new circuits or human management.
“We are currently pondering the following stages to expand on our work and keep this examination intriguing, for example, entangling the errand and concocting a ‘battery trade’ framework to make the trial more reasonable,” Tan added.
More information: Xianglong Tan, Zhikang Liu, Chen Yu, Andre Rosendo, Rearranging the environment to maximize energy with a robotic circuit drawing. arXiv:2111.08147v1 [cs.RO], arxiv.org/abs/2111.08147
Xianglong Tan et al, CircuitBot: Learning to survive with robotic circuit drawing, PLOS ONE (2022). DOI: 10.1371/journal.pone.0265340
Journal information: PLoS ONE





{kind=link}