People have forever been intrigued by scales not quite the same as their own, from monster items like stars, planets, and cosmic systems to the universe of the little: bugs, microorganisms, infections, and other minuscule articles. While the magnifying instrument permits us to see and notice the minuscule world, it is as yet challenging to collaborate with it.
Notwithstanding, human-robot collaboration and innovation could change all that. Microrobots, for example, can interact with the environment at much smaller scales than we can.Microsensors have been used to estimate the powers used by bugs during activities such as flight or walking.So far, most investigations have simply focused on estimating bug behavior rather than establishing an immediate bug microsensor connection.
Against this setting, specialists from Ritsumeikan College in Japan have now fostered a delicate miniature mechanical finger that can empower a more straightforward cooperation with the microworld. The review, led by teacher Satoshi Konishi, was distributed in logical reports.
“We were able to directly quantify the pushing motion and force of a pill bug’s legs and torso using our strain-sensing microfinger, which was previously impossible. We believe that our findings will spur further technical advancement in microfinger-insect interactions, resulting in human-environment interactions at far smaller sizes.”
Professor Satoshi Konishi
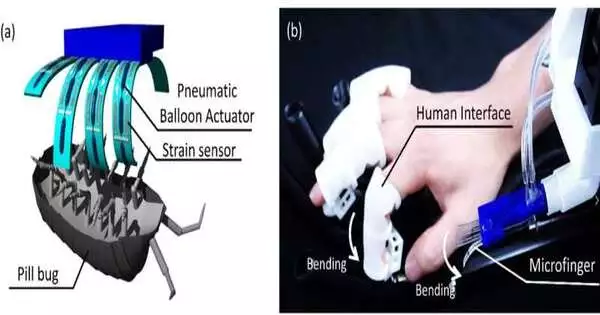
“A fluid metal adaptable strain sensor is used to create a material microfinger.”A delicate pneumatic inflatable actuator goes about as a counterfeit muscle, permitting control and finger-like development of the sensor. With a mechanical glove, a human client can straightforwardly control the microfingers. Prof. Konishi believes that “this type of framework takes into account a secure collaboration with bugs and other infinitesimal items.”
Utilizing their recently evolved microrobot arrangement, the exploration group examined the response power of a pill bug as a delegate test of a bug. The pill bug was set up utilizing a pull instrument, and the microfinger was utilized to apply power and measure the response power of the bug’s legs.
The response force estimated from the legs of the pill bug was around 10 mN (millinewtons), which concurred with recently assessed values. While only a delegate study and proof-of-concept, this result demonstrates an extraordinary commitment to acknowledging direct human collaborations with the microworld.Additionally, it can have applications even in augmented reality (AR) innovation. Utilizing robotized gloves and miniature detecting instruments, for example, the microfinger, numerous AR innovations concerning human-climate collaborations on the microscale can be understood.
“With our strain-detecting microfinger, we were able to directly quantify the pushing movement and power of the legs and middle of a pill bug—something that had previously been difficult to achieve.” “We guess that our outcomes will prompt further innovative advancement for microfinger-bug collaborations, prompting human-climate collaborations at a lot more limited sizes,” comments Prof. Konishi.
More information: Satoshi Konishi et al, Active tactile sensing of small insect force by a soft microfinger toward microfinger-insect interactions, Scientific Reports (2022). DOI: 10.1038/s41598-022-21188-2
Journal information: Scientific Reports





{kind=link}