
Neural radiance fields, or NeRFs, are cutting-edge methods in machine learning that can use two-dimensional images to create three-dimensional (3D) representations of things or environments. As these methods can show complex genuine conditions, everything being equal and exhaustively, they could significantly uphold advanced mechanics research.
Nonetheless, most existing datasets and stages for preparing NeRFs are intended to be utilized disconnectedly, as they require the consummation of a posture improvement step that essentially defers the production of photographically reasonable portrayals. As a result, the majority of roboticists have not yet been able to test their algorithms in real time on actual robots using these methods.
NerfBridge is a new open-source software package for training NeRF algorithms that was recently introduced by a Stanford University research team. This package, which was presented in a paper that was pre-published on arXiv, is designed to effectively bridge Nerfstudio, an open-source library designed to train NeRFs in real time, and ROS (the robot operating system), a well-known software library for robotics applications.
“Neural Radiance Fields (NeRFs) have recently piqued the interest of members of my lab, the Stanford Multi-robot Systems Lab, who were eager to investigate their potential uses in robotics. However, we discovered that, at the moment, there isn’t a simple way to apply these techniques to an actual robot, making it impossible to conduct any meaningful experiments with them.”
Javier Yu, the first author of the paper, told Tech Xplore.
According to Javier Yu, the paper’s first author, who spoke with Tech Xplore, “members of my lab, the Stanford Multi-robot Systems Lab, have been excited about exploring applications of neural radiation fields (NeRFs) in robotics. However, we found that right now there isn’t an easy way to use these methods with an actual robot, so it’s impossible to do any real experiments with them.” We decided to build the tools ourselves because they didn’t exist. As a result of our engineering push to see how NeRFs work on robots, we have a nice tool that we think will be helpful to many people in the robotics community.
NeRFs are modern strategies in light of fake brain networks that were first presented by the PC design research local area. By instructing a neural network to reconstruct the 3D geometry and color of a scene captured in a photograph or 2D image, they basically create detailed maps of the world.
Yu explained, “NeRFs offer a new perspective on how to approach the problem of mapping from images, which is one that we in the robotics community have been working on for a long time.” NeRFs are typically trained offline, with each scene’s NeRF being trained simultaneously after all of the images have been gathered beforehand. But in robotics, we want to use the NeRF directly for things like navigation, so it is useless if we only get it when we get there. Instead, we want to incrementally (online) construct the NeRF as the robot explores its environment. This is precisely the issue that NerfBridge addresses.
The software that Yu and his colleagues introduced, NerfBridge, makes use of images that are captured by the sensors and cameras that are embedded in actual robots. These images are continuously streamed into the powerful NeRF training library of Nerfstudio. This makes it possible to create NeRFs that are constantly improving and updating themselves as the robot takes new pictures of its surroundings.
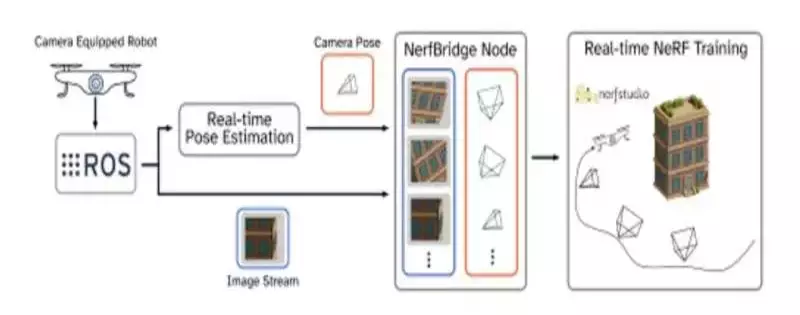
an illustration of how NerfBridge works with NerfStudio and robot systems. Pictures are gushed from the robot, and camera presentations are assessed continuously. After that, the posed images are sent to NerfBridge, which adds them to an instance of NerfStudio’s training data set. Credit: Yu et al.
To exhibit the capability of their technique, Yu and his partners utilized it to prepare a NeRF in view of pictures caught by a camera mounted on a quadrotor, a robot with four rotors, as it zoomed around in both indoor and outdoor conditions. Their outcomes were exceptional, highlighting the worth of NerfBridge for working with the utilization of NeRFs in advanced mechanics research.
This promising strategy could, along these lines, be utilized before long by different scientists to prepare NERFs and test their calculations on actual robots as they explore their general climate. In the meantime, Yu and his colleagues intend to investigate additional approaches that could expand the application of NeRFs in robotics.
Yu went on to say, “Ultimately, we hope that NerfBridge will lower the barrier of entry for other researchers to begin looking at applications of NeRFs in robotics and to test their new algorithms on robots in the real world.” From NerfBridge, we will demonstrate the concrete advantages of using NeRF-based maps for other robotics tasks like localization and navigation and investigate ways to enhance NeRF training when images are streamed from a robot.
More information: Javier Yu et al, NerfBridge: Bringing Real-time, Online Neural Radiance Field Training to Robotics, arXiv (2023). DOI: 10.48550/arxiv.2305.09761





{kind=link}