People intrinsically figure out how to adjust their developments in view of the materials they are taking care of and the assignments that they are attempting to finish. While cleaving explicit natural products or vegetables, for example, they could figure out how to cut around more enthusiastic parts, for example, avocado or peach seeds, or cautiously wipe out the external skin.
To help people with regular errands, for example, preparing and getting ready food, robots ought to likewise have the option to cut objects with blended material structures or surfaces. Moving this capacity to robots, in any case, has ended up being genuinely difficult up until this point.
Scientists at Columbia College, CMU, UC Berkeley, and different organizations in the U.S. have as of late developed RoboNinja, an AI-based framework that could permit robots to cut multi-material items, especially delicate articles with hard centers. Their paper, distributed on the arXiv pre-print server, could at last assist in improving the capacities of robots intended to assist people with errands and ordinary kitchen assignments.
“In contrast to previous works that used open-loop cutting movements to cut through single-material items (e.g., slicing a cucumber), RoboNinja tries to remove the soft component of an object while keeping the hard core, hence increasing yield,”
Zhenjia Xu, Zhou Xian and their colleagues wrote in their paper.
“As opposed to earlier works utilizing open-circle slicing activities to slice through single-material items (e.g., cutting a cucumber), RoboNinja means to eliminate the delicate piece of an item while saving the unbending center, subsequently boosting the yield,” Zhenjia Xu, Zhou Xian, and their partners wrote in their paper. “To accomplish this, our framework shuts down the insight activity circle by using an intelligent state assessor and a versatile cutting arrangement.”
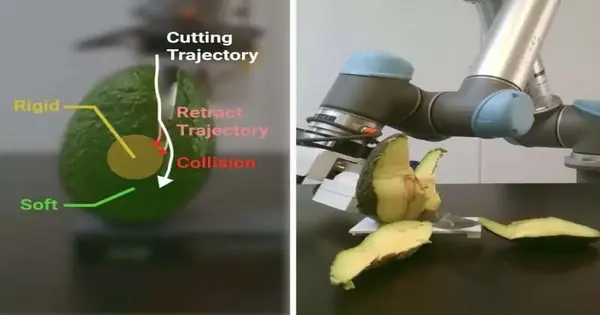
Xu, Xian, and their partners set off on a mission to make a framework that would permit a robot to really cut natural products like mangos, peaches, and avocados, eliminating the delicate mash from the unbending seed in the center. Their framework will likely eliminate however much mash as could reasonably be expected while limiting crashes with the focal seed and consuming a restricted measure of force.
“The framework initially utilizes scanty impact data to iteratively gauge the position and math of an item’s center and afterward creates shut circle cutting activities in view of the assessed state and a resistance esteem,” Xu, Xian, and their partners wrote in their paper. “The ‘adaptiveness’ of the arrangement is accomplished through resilience, which tweaks the approach’s conservativeness while experiencing crashes, avoiding the assessed center.”
To assess their framework for multi-material item cutting, the scientists established a cutting recreation climate that was more reasonable for surveying the issue they were handling. This context highlights various situations in which a robot cuts objects made of a mix of delicate and unbending materials.
“Existing test systems are restricted in mimicking multi-material items or figuring the energy utilization during the cutting system,” Xu, Xian, and their partners made sense of in their paper. “To resolve this issue, we foster a differentiable cutting test system that upholds multi-material coupling and takes into consideration the age of improved directions as evidenced by strategy learning.”
The consequences of the recreations run by Xu, Xian, and their partners were promising, as RoboNinja permitted their reenacted mechanical gripper to eliminate a lot of delicate materials from objects while limiting impacts with inflexible parts and consuming a sensible measure of energy. Hence, the group tried their system on a truly mechanical gripper to additionally approve its exhibition in certifiable settings, keeping in mind that cutting items with various center calculations
“Our analyses show that our technique can sum up well to novel center calculations and, surprisingly, genuine natural products,” the analysts deduced in their paper. “We trust our exploratory discoveries and the recently evolved test system will stimulate future work on robots getting the hang of including communications with multi-material articles.”
More information: Zhenjia Xu et al, RoboNinja: Learning an Adaptive Cutting Policy for Multi-Material Objects, arXiv (2023). DOI: 10.48550/arxiv.2302.11553




