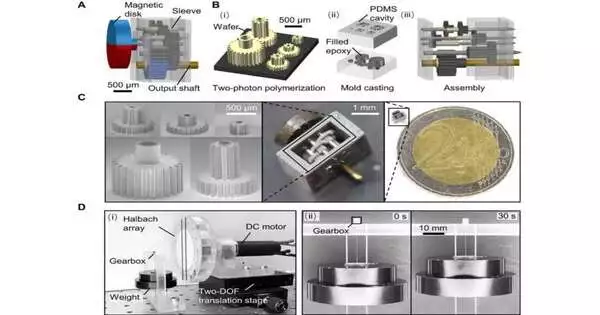
A group of scientists at the Max Planck Institute for Intelligent Systems, working with a couple of partners from the Harbin Institute of Technology, has fostered a small incited gearbox that can be utilized to give little robots more power. In their paper distributed in the journal Science Robotics, the group depicts how their gearbox functions and the power upgrades seen in a few sorts of small robots.
Throughout recent years, researchers have been pursuing the advancement of small robots that can be infused into the human body to do operations. The expectation is that such robots can be shipped off to find and obliterate harmful growth, for instance. Such little robots are too small to convey their own power plant; hence, they should be controlled by utilizing an outer attractive field. Sadly, as the robots get ever smaller, their power lessens as they have excessively minimal mass. In this new effort, the scientists have figured out how to build the force of the small robots by utilizing a little gearbox that assists them with becoming more grounded.
Credit: Chong Hong et al, Magnetically incited gearbox for the remote control of millimeter-scale robots, Science Robotics (2022). DOI: 10.1126/scirobotics.abo4401
The gearbox accompanies a magnet on its finish to saddle the power in an attractive field through the cog wheels in the case. What’s more, the gearbox can amplify the force of a robot by utilizing smart elements like flexible parts and mechanical linkages.
To utilize the gearbox, the small robots should have a method for exploiting them. For instance, by joining flexible parts with mechanical linkages, spring-like energy can develop strain and afterward discharge everything simultaneously. The mechanical linkages hold the flexible parts set up until the time has come to deliver the energy.
To test their theory, the scientists fabricated box-like designs with flexible wall parts that were gradually packed by the gearbox when it was presented to an attractive field. A mechanical linkage held the walls set up to permit the strain to be constructed. At the point when a specific measure of strain was reached, the walls were delivered, pushing the robot along an ideal course. To make a robot, a few of the case-like designs were snared together. Utilizing this methodology, the analysts had the option to make winch-type robots ready to lift as much as 103 grams, or jumpers that arrived at 119 millimeters. They likewise made crawlers and clampers.
More information: Chong Hong et al, Magnetically actuated gearbox for the wireless control of millimeter-scale robots, Science Robotics (2022). DOI: 10.1126/scirobotics.abo4401
Journal information: Science Robotics


{kind=link}