
In the event that man’s dearest companion is a canine, later on space travelers’ best friends likely could be meanderers. A procedure permitting space explorers in circle to control meanderers investigating planetary surfaces has been created by an examination group from ESA, the German Aerospace Center DLR and European scholarly community and industry, finishing in an Earth-based wanderer meeting instructed from the International Space Station. A paper distributed in the Science Robotics diary this week subtleties their outcomes.
“This is whenever that a space explorer first in space figured out how to control an automated framework on the ground in such a vivid, natural way,” remarks Aaron Pereira of DLR.
“Our 6 level of opportunity control interface integrates force input with the goal that the space traveler can encounter exactly what the meanderer feels, even down to the weight and attachment of the stones it contacts. What this does is help make up for any impediments of data transmission, unfortunate lighting or sign postponement to give a genuine feeling of drenching — meaning the space traveler feels like they are there at the scene.”

Allow the robots to take the strain
Mechanical technology engineer Thomas Krueger, heading ESA’s Human Robot Interaction Laboratory, adds: “Robots can be given restricted independence in known, organized conditions, yet for frameworks doing exploratory assignments, for example, test assortment in obscure, unstructured conditions some sort of ‘human-on the up and up’ oversight becomes fundamental. Yet, direct control has not been possible because of the inborn issue of sign deferral — with transmission times obliged by the speed of light.
Simple 1 example assortment apparatus. Credit: European Space Agency
“So we have been pursuing the idea of people remaining securely and serenely in circle around the Moon, Mars or other planetary bodies, yet being close enough for direct oversight of wanderers on a superficial level — joining the human qualities of adaptability and ad lib with a hearty, capable robot on the spot to exactly do their orders.”
“This is the first time that an astronaut in space managed to control a robotic system on the ground in such an immersive, intuitive manner,”
Aaron Pereira of DLR
A group from ESA’s HRI Lab and DLR’s Robotics and Mechatronics Center worked together on a progression of logically more complicated tests, first on Earth then stretching out into space.
“In the end we expected to perform practicality tests from space since past examination demonstrates the way that weightlessness can debase human execution during power and movement undertakings,” adds Thomas. “This and other novel natural elements implied that Earth-based reproductions wouldn’t be adequate.”
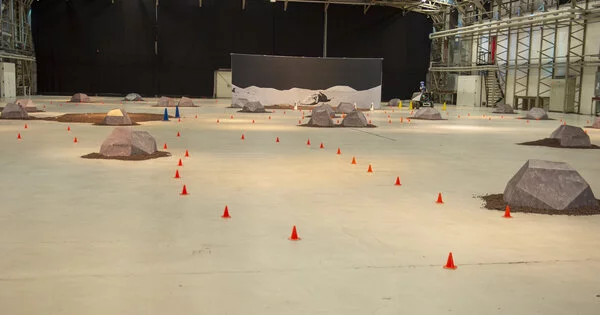
Their endeavors finished in the initial segment of the Analog-1 analysis in late 2019. Space traveler Luca Parmitano on board the ISS worked the gripper-prepared ESA Interact meanderer in a fake lunar climate inside an overhang in Valkenburg, the Netherlands to review shakes and gather tests. The two-hour space-to-ground test was a triumph, conquering a two-way signal deferral averaging more than 0.8 seconds and an information bundle misfortune pace of 1% in addition to.
Solving the time factor
“Despite the fact that the ISS is in circle only 400 km upward, its signs are handed-off to Earth by means of geostationary telecom satellites, then to Europe from Texas through an overseas link,” makes sense of Aaron.
“Our group at DLR needed to plan a control calculation that could work consistently notwithstanding this delay. Since there is a deferral in the power criticism got by the administrator, they could keep on moving the robot further even after it has hit a stone. This could prompt the robot leaving sync with its regulator, possibly vibrating like insane, maybe in any event, harming itself.
“To forestall that event, we utilize an idea called ‘resignation’ — we take a gander at the general measure of energy an administrator places in, and on the remote side ensure the robot never gives out any more energy than that, as well as the other way around. Like when you push a youngster on a swing, they are never going to go any higher than the principal swing — and with erosion, etc will swing continuously endlessly lower.”
Simple 1 trial overhang. Credit: European Space Agency
“So for example, when the robot arm is moving and abruptly hits a stone it would take additional energy to move which the space traveler didn’t order, so we decrease the order energy immediately to dial back the arm. Then, at that point, after the 850 microsecond delay, when the space traveler feels the stone they can then decide to add the additional energy to push it.
“This ‘Time Domain Passivity Approach for High Delay’ procedure is extremely natural practically speaking and ought to have the option to function admirably with higher defer times also.”
Next steps on Mount Etna
Thomas finishes up: “The primary impediment of the work done as such far is that our indoor simple lunar climate needs authenticity. So this mid year will see the second piece of Analog-1 happen on the volcanic slants of Mount Etna in Italy as a component of a bigger worldwide mechanical test crusade called ARCHES.
“Luca Parmitano will by and by be controlling the Interact meanderer, this time in 1G from the beginning.”




