
Imagine a network of autonomous, interconnected robots performing a coordinated dance to navigate the pitch-black ocean environment while carrying out scientific surveys or rescue operations.
A team led by Brown University researchers has presented important first steps for building underwater navigation robots in a new study that was published in Scientific Reports. In the study, the design of a small robotic platform called Pleobot is described. This platform can be used to build small, highly maneuverable underwater robots as well as a tool for understanding the krill-like swimming method.
Currently, Pleobot is made up of three articulated sections that mimic metachronal swimming, which is similar to swimming with krill. The researchers drew inspiration for the creation of Pleobot from krill, aquatic athletes who excel at swimming, accelerating, braking, and turning. The study sheds new light on the fluid-structure interactions that are necessary for krill to maintain steady forward swimming and demonstrates how Pleobot can imitate the legs of swimming krill.
“We created and programmed a robot that precisely mimics the essential movements of the legs in order to produce specific motions and change the shape of the appendages. This enables us to investigate various setups in order to gather measurements and make comparisons that would otherwise be impossible with live animals.”
Nils Tack, a postdoctoral associate in the Wilhelmus lab.
The study says that Pleobot has the potential to help scientists learn how to make better ocean-navigation robots by taking advantage of 100 million years of evolution.
Sara Oliveira Santos, the lead author of the new study and a Ph.D. candidate at Brown’s School of Engineering, stated, “Experiments with organisms are challenging and unpredictable.” We are able to investigate every aspect of Pleobot’s krill-like swimming and its superior underwater maneuvering thanks to its unparalleled resolution and control. Our objective was to develop a comprehensive tool for comprehending krill-like swimming, which necessitated including all of the characteristics that make krill swimmers so athletic.”
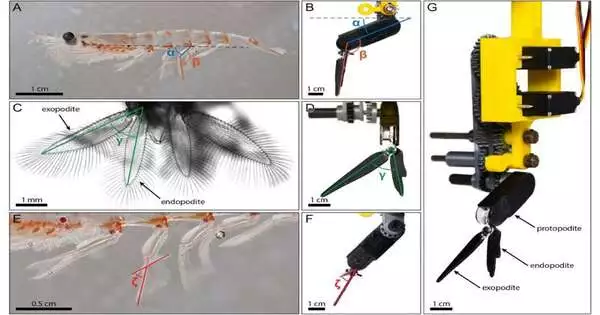
The pleopod’s morphology and kinematic parameters. A) (Euphausia superba), (C) (Palaemonetes paludosus) and (E) show the kinematic boundaries of free-swimming shrimp integrated in the Pleobot introduced in (B), (D) and (F): The angle between the body’s axis and the proximal segment (protopodite), the angle between the protopodite and the distal biramous segment (formed by the endopodite and the exopodite), the angle that appears when the exopodite and endopodite separate during the power stroke, and the angle that describes the cupping that forms between the exopodite and the endopodite are all examples. Based on a mechanical gear train, the Pleobot (G) actively controls and integrates while remaining passive. It is important to note that (C) was taken from behind the organism, whereas (E) depicts a side-by-side view of the pleopods, just like in A.. Credit: Scientific Reports (2023). DOI: 10.1038/s41598-023-36185-2.
The journal Scientific Reports DOI: Researchers from the lab of Assistant Professor of Engineering Monica Martinez Wilhelmus at Brown and those from the lab of Francisco Cuenca-Jimenez at the Universidad Nacional Autónoma de México collaborated on this project at 10.1038/s41598-023-36185-2.
The project’s main goal is to learn how metachronal swimmers, like krill, can survive in complex marine environments and make massive daily vertical migrations of over 1,000 meters, or the height of three Empire State Buildings.
Nils Tack, a postdoctoral associate in the Wilhelmus lab, stated, “We do not have comprehensive data. We have snapshots of the mechanisms they use to swim efficiently.” A robot that precisely imitates the fundamental movements of the legs in order to produce specific motions and alter the appendages’ shape was constructed and programmed by us. Because of this, we are able to examine various configurations, measure them, and make comparisons that would not be possible without using live animals.
Krill frequently demonstrate remarkable maneuverability by sequentially deploying their swimming legs in a wave-like motion from the back to the front in the metachronal swimming technique. Deployable swarm systems could, in the future, be used to map Earth’s oceans, participate in large-scale search-and-recovery missions, or be sent to moons in the solar system, like Europa, to study their oceans.
“In nature, krill aggregations are a great example of swarms: They are organisms with streamlined bodies that can travel up to one kilometer each way and have excellent underwater maneuverability, according to Wilhelmus. Our long-term goal is to create the next generation of autonomous underwater sensing vehicles, and this study serves as the foundation. We will be able to make well-informed choices regarding future designs if we are able to comprehend fluid-structure interactions at the appendage level.
The researchers have passive control over the biramous fins of the Pleobot while exerting active control over the two leg segments. It is believed that this is the first platform that imitates these fins’ opening and closing motion. A team from fluid mechanics, biology, and mechatronics collaborated on the construction of the robotic platform over a number of years.
The researchers constructed their model 10 times larger than krill, which typically have a size that is similar to a paperclip. The platform is mostly made of parts that can be printed in 3D. The design is open-source, so other teams can use Pleobot to continue answering questions about metachronal swimming for other organisms like lobsters as well as krill.
The group provides the answer to one of the numerous unidentified mechanisms of krill swimming in the published study: how they generate lift to avoid sinking as they swim forward. Because they are slightly heavier than water, krill will begin to sink if they are not constantly swimming. Oliveira Santos stated that in order to avoid this, they still need to generate lift while swimming forward in order to maintain their current water height.
According to Yunxing Su, a postdoctoral associate in the laboratory, “We were able to uncover that mechanism by using the robot.” We discovered a significant effect of a low-pressure region on the back side of the swimming legs that increases lift force during the moving legs’ power stroke.”
The researchers hope to build on this initial success in the coming years and further develop and test the designs in the article. The team is currently working on incorporating shrimp’s morphological characteristics, such as their flexibility and appendage bristles, into the robotic platform.
More information: Sara Oliveira Santos et al, Pleobot: a modular robotic solution for metachronal swimming, Scientific Reports (2023). DOI: 10.1038/s41598-023-36185-2





{kind=link}