Unmanned aerial vehicles (UAVs), more commonly referred to as drones, have already proven to be very promising for addressing a number of real-world issues. For instance, drones enable users to take aerial photographs, monitor remote or natural environments, deliver packages, and assist agents in search and rescue and military operations. Despite the fact that these systems are already in use by numerous businesses and individuals all over the world, they may have significant limitations, such as a short operating time and high power consumption.
As a result, roboticists have been looking into alternative flying robot designs over the past few years, some of which are based on birds, bats, insects, or other animals. The so-called flapping-wing robots, which mimic the movements of a bird’s wings to make flying easier, are among the most promising of these designs.
Recently, researchers at the GRVC Robotics Lab at the University of Seville investigated the potential benefits of flapping-wing robots, particularly in terms of how much power they use. Their paper, which was accepted for publication and is available for pre-printing on the arXiv pre-print server, looks at how well each component of a flapping-wing robot works in an experimental setting to see if it could save energy.
“A Flapping Wing Flying Robot (FWFR) can glide in favorable wind conditions, consuming significantly less energy. In this paper, the power consumption of two sets of FWFR components is examined: a) motor/electronic components and b) a vision system for monitoring the environment during flight.”
Raul Tapia, Alvaro Cesar Satue and their colleagues wrote in their paper.
Raul Tapia, Alvaro Cesar Satue, and their colleagues wrote in their paper, “One of the motivations for exploring flapping-wing aerial robotic systems is to seek energy reduction while maintaining maneuverability in comparison to conventional unmanned aerial systems.” A flying robot known as a flapping-wing flying robot (FWFR) can glide in favorable wind conditions, resulting in significant energy savings. The power consumption of two sets of FWFR components is examined in this work: a vision system and motor/electronic components for monitoring the environment during flight.”
E-flap, a flapping-wing robot developed in their lab, was specifically evaluated in Tapia, Satue, and their colleagues’ experiments. This robot, which debuted two years ago, can autonomously fly like a bird while flapping its wings in both indoor and outdoor environments. It weighs approximately 500 grams.
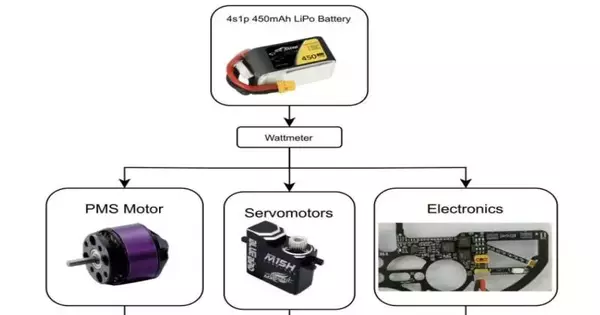
A battery, a motor, servomotors, electronics, artificial wings, a tail, and a connectivity system were all put through a series of tests by the researchers to see how much power each component used to build the first prototype of the robot. During the three distinct phases of the robot’s flight—when it was launched, as it ascended, and while cruising—the energy consumption of these components was evaluated.
They discovered that the robot consumed 47.1% more energy while cruising than it did while launching and ascending. Additionally, they demonstrated that event cameras were the most energy-efficient of the various sensors that would enable the robot to perceive its surroundings. By highlighting the components that increase their energy efficiency and extend their flight time, the findings of this study could serve as a guide for the development of flapping-wing robots in the future.
Tapia, Satue, and their colleagues wrote in their paper, “A measurement device is used to record the power utilization of the motors in the launching and ascending phases of the flight as well as in cruising flight around the desired height.” In addition, the energy consumption of event cameras and stereo vision systems has been examined. The results are a first step toward reducing battery consumption and, as a result, increasing flight time.”
More information: Raul Tapia et al, Experimental Energy Consumption Analysis of a Flapping-Wing Robot, arXiv (2023). DOI: 10.48550/arxiv.2306.00848





{kind=link}