A paper distributed in the April 2022 issue of IEEE Robotics and Automation Letters frames the AMBER group’s technique and addresses the main occasion of joining mixture zero elements (HZD)—a numerical system for creating stable movement—with an outer muscle model to control a mechanical assistive gadget for strolling.
The outer muscle model is a computational device to harmlessly quantify the connection between muscle power and joint contact force. HZD is right now being used to make stable strolling walks for bipedal robots, and the muscle model addresses how much a muscle stretches or contracts with a given joint setup.
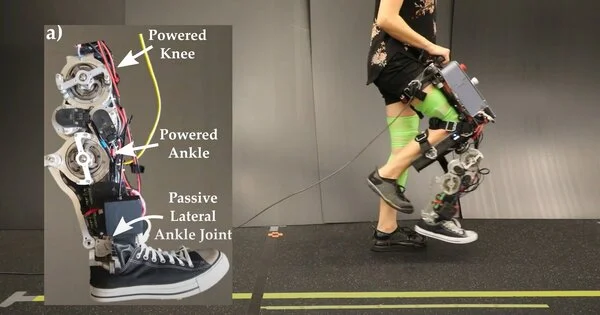
The group shows its methodology on a battery-powered, mechanized prosthetic leg. The battery drives the engines, which turn the joints. The engine development is directed by the numerical calculations created by the scientists.
“One approach of operating a robot is to specify the desired motions of each of the joints, The knee and ankle of our prosthetic device are activated. So we instruct the robot to perform the desired motions and velocity of those joints throughout time.”
Maegan Tucker, a graduate student in mechanical and civil engineering
To make this numerical calculation, the AMBER exploration group recorded the muscle movement of an individual strolling with a prosthesis that followed the ideal movement created with HZD alone. This was done utilizing electromyography (EMG), in which one terminal is put on the skin over a particular muscle. Then, at that point, the group examined the EMG movement of an individual strolling with a prosthesis that followed the ideal movement produced by HZD when joined with the muscle models. The last option all the more intently looks like how a human strolls without a prosthesis.
“The muscle movement example of a human strolling without the prosthetic is what we need to draw nearer to,” says Rachel Gehlhar, an alumni understudy in mechanical and structural design. Installing outer muscle models into the enhancement issue—the calculation at the end of creating steps for the prosthesis—provides a foundation for producing more regular walks.
“In the event that you’re planning a direction for a mechanical assistive gadget, a good step shouldn’t just be steady but in addition feel regular,” says Amy Li, an understudy in calculation and brain frameworks. A direction addresses how the specialists believe the prosthetic gadget should move over the long run.
“One technique for controlling a robot is to depict the ideal movements of every one of the joints,” adds Maegan Tucker, an alumna understudy in mechanical and structural design. The robot for this situation is the leg prosthesis. The knee and lower leg joints follow their own separate directions because of the order shipped off the engine. “Our prosthetic gadget has two activated joints: the knee and lower leg. So the ideal movements and speed of those joints after some time is everything that we say to the robot to do. “
Credit: AMBER-Lab
One astounding disclosure was that the mix of HZD and the muscle models created desired strolling strides quicker than normal. Driving the automated model to follow the examples of muscle-ligament connections adds further limitations to the step age advancement issue, so one could anticipate that the issue should be more challenging to address. However, with these extra requirements, a steady strolling step is created after less emphasis on the streamlining issue.
“Our supposition will be that the joined model is assisting guide the improvement issue toward arrangements, which will lead to normal strolling,” Tucker says. “At the end of the day, the extra limitations assist with directing the streamlining issue toward steady and more normal walks quickly.”
This work helps overcome any issues between techniques that utilize calculations to create wanted strolling movement and the field of biomechanics, which normally aren’t covered. The subsequent coordinated effort brings the AMBER lab a bit nearer to making an interpretation of normal movement for a mechanical assistive gadget like a prosthesis, with possible applications in full-body exoskeleton gadgets for individuals with paraplegia.
More information: Kejun Li et al, Natural Multicontact Walking for Robotic Assistive Devices via Musculoskeletal Models and Hybrid Zero Dynamics, IEEE Robotics and Automation Letters (2022). DOI: 10.1109/LRA.2022.3149568


{kind=link}