NASA’s Mars wanderers take a stab at weighty logical disclosures as they cross the Martian scene. Simultaneously, the teams working to safeguard the wanderers give their best to safeguard them and the billions of dollars behind the mission. This balance of chance and prize drives the decisions about where the wanderers go, how they get there, and what science they reveal.
Specialists in the School of Software Engineering’s Mechanical Technology Foundation (RI) have fostered another way to deal with adjusting the dangers and logical benefit of sending planetary wanderers into perilous circumstances.
David Wettergreen, an exploration teacher in the RI, and Alberto Candela, who procured his Ph.D. in mechanical technology and is currently an information researcher at NASA’s Fly Drive Lab, will introduce their work, “A Way to Deal with Science and Chance Mindful Planetary Wanderer Investigation,” at the IEEE and RSJ Global Meeting on Wise Robots and Frameworks not long from now in Kyoto, Japan. The paper has also been published in IEEE Advanced Mechanics and Robotization Letters.
“We looked at how to balance the risk of going to tough regions against the value of what you could learn there. This is the next stage in autonomous navigation and the generation of more and better data to assist scientists.”
David Wettergreen, a research professor in the RI,
“We took a gander at how to adjust the gamble related to going to testing places against the worth of what you could find there,” said Wettergreen, who has dealt with independent planetary investigation for quite a long time at Carnegie Mellon College. “This is the next stage in our independent route to creating more and better information to help researchers.”
For their methodology, Wettergreen and Candela joined a model used to gauge science esteem with a model that evaluates risk. Science esteem is assessed by involving the robot’s trust in its translation of the mineral piece of rock. Assuming the robot accepts it has recognized shakes accurately without requiring extra estimations, it might decide to investigate some new places. Assuming the robot’s certainty is low, nonetheless, it might choose to keep on concentrating on the ongoing region and further develop its mineralogical model. For quite a long time, Zo, a wanderer that for quite a long time has tried advances for independence, involved a past variant of this model during tests in 2019 in the Nevada desert.
The scientists decided risk through a model that utilizes the geology of the territory and the landscape’s cosmetic material to gauge how troublesome it will be for the wanderer to arrive at a particular area. A lofty slope with free sand could be a wanderer’s main goal — a genuine worry on Mars. In 2004, NASA landed twin wanderers, Soul and Opportunity, on Mars. Soul’s main goal was finished in 2009 when it became caught in a sand rise and its wheels slipped when it attempted to move. The opportunity continued and worked until 2018.

Zo, a wanderer created by Carnegie Mellon College’s Advanced Mechanics Foundation, tests independent innovation in the desert. (Credit: Carnegie Mellon College)
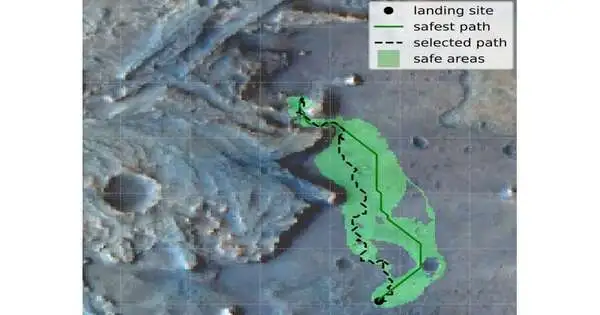
Wettergreen and Candela tried their system using genuine Mars surface information. The pair sent a mimicked wanderer running about Mars utilizing this information, graphed various ways in view of shifting chances, and afterward assessed the science acquired from these missions.
“The wanderer excelled all alone,” Candela said, depicting the mimicked Mars missions. “Much like high-risk recreations, there were still a lot of regions for the wanderer to investigate, and we found that we actually made intriguing disclosures.”
This examination builds on many years of RI work researching independent planetary investigation. Papers extending once more into the 1980s propose and show techniques that would permit wanderers to move independently across the outer layers of different planets, and innovation created through this exploration has been utilized on late Mars meanderers.
Spearheading independent innovation, scientists at CMU proposed Ambler, a confident, six-legged robot that could focus on its objectives and graph its own way around places like Mars. The group tried the six-meter-tall robot in the mid 1990s. More wanderers followed, including Ratler, Migrant, and Hyperion—a meanderer intended to follow the sun as it goes to charge its batteries.
Zo started its work in cruel conditions in 2004 and has voyaged many miles in Chile’s Atacama Desert, a climate in numerous ways like Mars. By 2012, Zo’s missions in the desert moved to zero in on independent investigation and the choices behind where to go and what tests to gather. After a year, the wanderer independently chose to bore into the desert soil, and it found what ended up being strange, profoundly specific organisms, showing the way that robotized science can bring about important disclosures.
Candela and Wettergreen desire to test their new work on Zo during an impending outing to the Utah desert. The pair, likewise, see their examination as making important commitments to future lunar investigation. Their methodology could be used by researchers as a device to explore likely courses ahead of time and equilibrium the gamble of those courses with the science that could be acquired. The methodology could also aid an age of independent wanderers sent off the planet’s outer layer to lead science experiments without the need for constant human involvement.The wanderer could survey the gamble and award prior to graphing its own course.
“Our objective isn’t to kill researchers, not to wipe out the individual from the request,” Wettergreen said. “Truly, the point is to empower a mechanical framework to be more useful for researchers. We want to gather more and better information for researchers to use in their examinations.
More information: Alberto Candela et al, An Approach to Science and Risk-Aware Planetary Rover Exploration, IEEE Robotics and Automation Letters (2022). DOI: 10.1109/LRA.2022.3191949
Conference: IEEE and RSJ International Conference on Intelligent Robots and Systems




