Throughout the last ten years, mechanical frameworks have upset various areas, including the agrarian and cultivating areas. Many errands that were customarily performed physically can now possibly be computerized, supporting productivity and decreasing the responsibility of ranchers and other farming specialists.
Two parts of cultivating that could incredibly profit from robotization are weed administration and yield checking. As the interest in natural food varieties that are developed utilizing a base measure of synthetics and pesticides has risen fundamentally throughout the long term, numerous ranchers are looking for feasible and cleaner procedures to control weeds, dispose of irritations, and track the condition of their harvests.
A group of specialists at the College of Bonn has fostered another mechanical framework that could end up being useful to ranchers to oversee weeds and screen crops all the more productively. This framework, named BonnBot-I, was presented in a new paper published on the pre-print server arXiv.
“A recent weeding challenge has been the desire to reduce herbicide and pesticide applications while maintaining crop quality and quantity. We provide BonnBot-I, a precision weed management tool with field monitoring capabilities.”
Alireza Ahmadi, Michael Halstead and Chris McCool, the researchers who developed the robot,
“Development and weeding are two of the essential errands performed by ranchers today,” Alireza Ahmadi, Michael Halstead, and Chris McCool, the specialists who fostered the robot, wrote in their paper. “A new test for weeding is the craving to decrease herbicide and pesticide medicines while keeping up with crop quality and amount. We present BonnBot-I, an exact weed administration stage that can likewise perform field observation.”
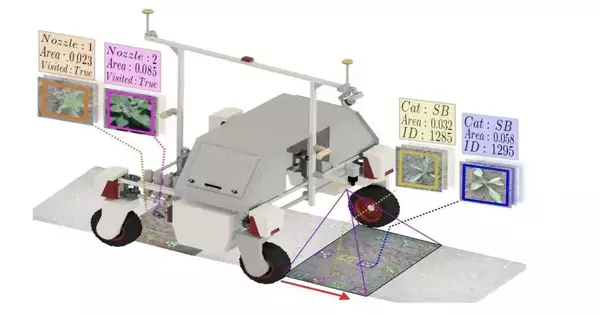
The robot made by this group of specialists utilizes a few restriction sensors in light of GPS innovations and odometry. The robot can travel through fields to find, group, and count plants while likewise overseeing weeds, utilizing different apparatuses coordinated in its body structure.
Remarkably, the framework is completely viable with ROS, the essential automated working framework. As a feature of their review, Ahmadi and his partners likewise ordered a new dataset for preparing calculations to find and count corn, a harvest that can be challenging to detect using PC vision.
“Driven by crop checking approaches that can precisely find and group plants (weed and yield), we further work on their presentation by combining the stage-accessible GNSS and wheel odometry,” the scientists composed. “This further develops the exactness of our yield observing methodology from a standardized typical blunder of 8.3% to 3.5%, assessed on another freely accessible corn informational collection. We likewise present a clever plan of weeding devices mounted on straight actuators assessed in reproduced conditions.”
Up until this point, the scientists assessed the BonnBot-I robot in recreated fields that reflected the commonplace dissemination of harvests in genuine fields. Their underlying discoveries were promising, proposing that their robot could ultimately turn into a supportive innovation for ranchers. Later on, the group could conduct further tests in certifiable conditions utilizing an actual model of BonnBot-I to additionally approve its true capacity.
“We reproduce weed circulations from a genuine field, utilizing the outcomes from our checking approach, and show the legitimacy of our work area division strategies, which require essentially less development (a half decrease) to accomplish comparable outcomes,” the specialists wrote. “Generally speaking, BonnBot-I is a huge forward-moving step in exact weed administration with an original strategy for specifically splashing and controlling weeds in an arable field.”
More information: Alireza Ahmadi et al, BonnBot-I: A Precise Weed Management and Crop Monitoring Platform, arXiv (2023). DOI: 10.48550/arxiv.2307.12588
Alireza Ahmadi et al, BonnBot-I: A Precise Weed Management and Crop Monitoring Platform, 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2022). DOI: 10.1109/IROS47612.2022.9981304





{kind=link}