Engineers have developed a wide range of animal-inspired robotic systems over the past few decades, including four-legged robots as well as snake, insect, squid, and fish-inspired systems. However, there haven’t been many studies looking into how these robots interact with their biological counterparts.
Scientists at Peking College and China Rural College have recently decided to investigate what happens when live fish are set in a similar climate as a mechanical fish. Their discoveries, distributed in Bioinspiration and Biomimetics, could both illuminate the improvement regarding fish-roused robots and shed some new light on the way of behaving of genuine fish.
“Our examination group has been zeroing in on the improvement of self-pushed mechanical fish for a long time,” Dr. Junzhi Yu, one of the scientists who did the review, told Tech Xplore. “During our field experiments, we saw a fascinating phenomenon in which live fish followed robotic fish as they moved. We are eager to learn more about this “fish following” behavior and the underlying principles that underlie it.”
“Our research team has been working on creating self-propelled robotic fish for a while. During our field tests, we noticed an intriguing phenomena in which live fish were seen trailing the robotic fish. We are keen to delve deeper into the ‘fish following’ behavior and further investigate the underlying concepts that underlie this phenomenon.”
Dr. Junzhi Yu, one of the researchers who carried out the study,
The vital goal of the new work by Dr. Yu and his partners was to accumulate new knowledge about how fish connect with the fish-like robots created by their lab, as this could help both the mechanical technology and science research networks. The mechanical fish utilized in their examinations was painstakingly intended to repeat the appearance, body shape, and development of koi fish, enormous and vivid freshwater fish beginning from Eastern Asia.
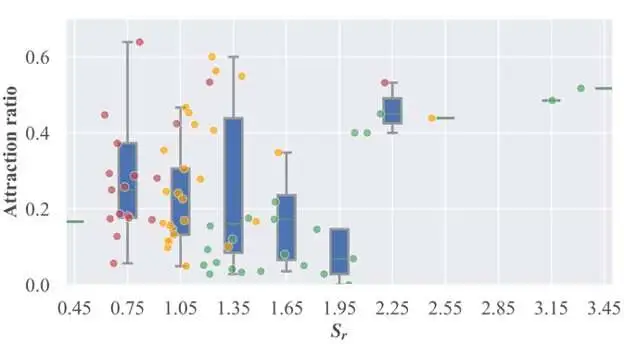
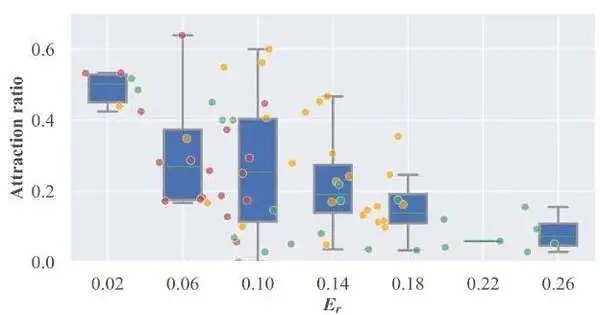
Connection between fascination proportion and Sr. The figure shows the connection between the fascination proportion and the Strouhal number of the mechanical fish when communication happens of the mechanical fish when communication happens. The attraction ratio and the Strouhal number have a negative correlation with a Spearman rank correlation coefficient of 0.266 and a P value of 0.033 when the Strouhal number Sr is less than 1.95. There is a step-up in the attraction ratio that occurs when the Strouhal number is greater than 1.95. This step directly jumps to a higher level of 0.4 to 0.6. This suggests that fish are attracted to robotic fish more when the robotic fish swims at a low speed with a small swing amplitude and high frequency. Moreover, at a similar recurrence, the higher the Strouhal number, the lower the swimming velocity, and the higher the fascination proportion. Credit: Zhou et al.
“We have developed a control system that generates rhythm signals for the oscillations of our system’s two concatenated joints” (Zhou et al.). “Using the central pattern generator (CPG) model,” Dr. Yu explained Our robotic fish can mimic the body-caudal fin (BCF) motion of koi fish thanks to these signals, which cause the flexible caudal fin to swing and produce an anti-Karman vortex street. Our self-propelled robotic fish is an excellent instrument for studying fish behavior because of its design.
Dr. Yu and his colleagues experimented by putting one or two prototypes of their robot that looked like a koi fish in the same tank as one or more live fish. They then saw how the fish acted within sight of this robot and surveyed whether their conduct differed in light of the number of other live fish available in the tank with them.
Dr. Yu stated, “The analysis of experiments on quantity variation and parameter variation is the most notable achievement of our study.” We discovered through extensive testing that live fish are significantly less active when left alone, with the most active situation occurring when a robotic fish interacts with two real fish. Our experiments on parameter variation also revealed that live fish may not only move with the robotic fish at high frequency and high amplitude but may also respond more proactively to robotic fish that swim at low frequency and high amplitude.”
The findings of the study shed a fascinating new light on the collective behavior of fish, which has the potential to direct the development of additional robots that resemble fish. Other teams might be inspired by their work to investigate how live animals and robots interact with one another. This could help us learn more about these animals’ social behavior and how they would react to robots if they were ever introduced to their environment.
Dr. Yu continued, “The use of flexible materials such as dielectric elastomer to create silent and vibration-free propulsion technology is one promising direction for the further development of robotic fish.” We will be able to achieve a higher level of bionic interaction between robotic fish and real fish as a result, opening up new avenues for studying marine life and aquatic environments. With the progress of innovative work around here, we desire to foster a few business items for intelligent shows.”
More information: Ziye Zhou et al, Proactivity of fish and leadership of self-propelled robotic fish during interaction, Bioinspiration & Biomimetics (2023). DOI: 10.1088/1748-3190/acce87




