
Honey bees are cumbersome fliers. It is estimated that a scrounging honey bee finds a blossom about once every second, which harms its wings over the long haul. However, regardless of having numerous minuscule tears or openings in their wings, honey bees can in any case fly.
Aeronautical robots, then again, are not really strong. Punch holes in the robot’s wing engines or cleave off a piece of its propeller, and chances are very great that it will be grounded.
Motivated by the solidity of honey bees, MIT specialists have created fix procedures that empower a bug-sized elevated robot to support extreme harm to the actuators, or counterfeit muscles, that power its wings — yet to in any case really fly.
They improved these fake muscles so the robot can more readily disengage surrenders and beat minor harm with as few openings in the actuator as possible. Moreover, they demonstrated a clever laser-fix strategy that can assist the robot with recovering from extreme harm, for example, a fire that sears the gadget.
Utilizing their methods, a harmed robot could keep up with flight-level execution after one of its counterfeit muscles was hit by 10 needles, and the actuator was as yet ready to work after an enormous opening was singed into it. Their maintenance strategies empowered a robot to continue to fly even after the specialists cut off 20% of its wing tip.
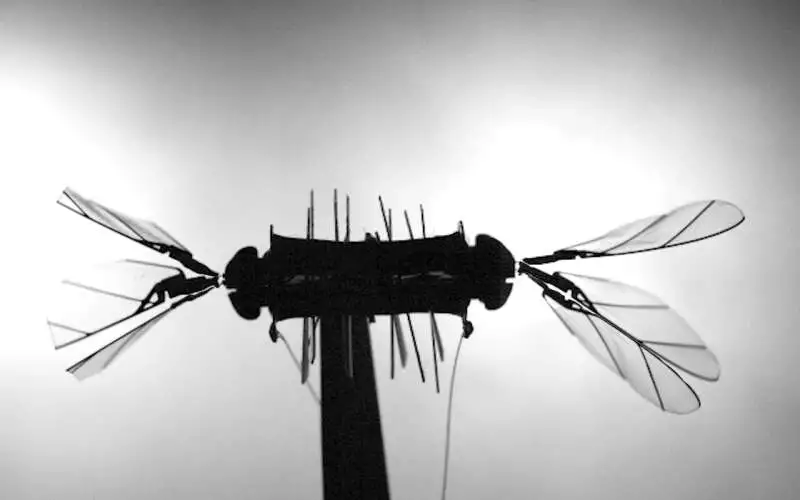
MIT scientists have created versatile counterfeit muscles that can empower bug-scale airborne robots to recover flight execution in the wake of experiencing extreme harm.
This could improve multitudes of small robots ready to perform errands in extreme conditions, such as leading a pursuit mission through an imploding building or thick backwoods.
“We invested a great deal of energy grasping the elements of delicate, fake muscles, and, through both another manufacturing technique and another understanding, we can show a degree of versatility to harm that is practically identical to bugs. We’re exceptionally pumped up for this. In any case, the bugs are as yet better than us, as they can lose up to 40% of their wing regardless of whether they fly. We actually have make-up work for lost time to do,” says Kevin Chen, the D. Reid Weedon, Jr. Partner Teacher in the Branch of Electrical Designing and Software Engineering (EECS), the Head of the Delicate and Miniature Mechanical Technology Lab in the Exploration Research Center of Hardware (RLE), and the Senior Creator of the Paper Distributed in Science Advanced Mechanics on These Most Recent Advances.
Robot fix strategies
The small, rectangular robots being created in Chen’s lab are about the same size and shape as a microcassette tape; one robot, however, weighs barely more than a paper cut. Wings on each corner are controlled by dielectric elastomer actuators (DEAs), which are delicate fake muscles that utilize mechanical powers to fold the wings quickly. These fake muscles are produced using layers of elastomer that are sandwiched between two razor-slender cathodes and then moved into a soft cylinder. At the point when voltage is applied to the DEA, the cathodes crush the elastomer, which folds the wing.

Yet, minute defects can prompt ignites that consume the elastomer and influence the gadget to fizzle. Around a long time ago, specialists found they could keep DEA disappointments at bay from one minuscule deformity by utilizing an actual peculiarity known as self-clearing. In this cycle, applying high voltage to the DEA detaches the neighborhood cathode around a little imperfection, disconnecting that disappointment from the remainder of the terminal so the fake muscle actually works.
Chen and his partners utilized this self-clearing process in their robot-fix procedures.
To begin with, they improved the convergence of carbon nanotubes that contain the cathodes in the DEA. Carbon nanotubes are areas of strength for super-minuscule rolls of carbon. Having fewer carbon nanotubes in the terminal works on self-clearing, since it arrives at higher temperatures and consumes more extreme heat without any problem. In any case, this likewise decreases the actuator’s power thickness.
“At one point, you cannot get sufficient energy out of the framework, but we really want a ton of energy and the ability to fly the robot. We needed to track down the ideal point between these two imperatives: advancing oneself and clearing property under the requirement that we actually believe the robot should fly,” Chen says.
Nevertheless, even an upgraded DEA will fall flat in the event that it experiences serious harm, similar to a huge opening that lets a lot of air into the gadget.
Chen and his group utilized a laser to treat significant deformities. They painstakingly cut along the external forms of a huge imperfection with a laser, which causes minor damage around the border. Then, they can utilize self-clearing to consume off the marginally harmed anode, segregating the bigger deformity.
“As it were, we are attempting to perform a medical procedure on muscles. Be that as it may, on the off chance that we don’t utilize sufficient power, then we can’t cause sufficient harm to confine the imperfection. Then again, assuming we use a lot of force, the laser will cause extreme harm to the actuator that will not be clearable,” Chen says.
The group before long understood that, while “working” on such minuscule gadgets, it is extremely challenging to notice the cathode to check whether they had effectively segregated a deformity. Drawing on past work, they integrated electroluminescent particles into the actuator. Presently, assuming they see light sparkling, they realize that piece of the actuator is functional, but dull patches mean they have effectively separated those regions.
Flight test achievement
Whenever they had consummated their procedures, the specialists led tests with harmed actuators — some had been punched by many needles, while others had openings consumed into them. They estimated how well the robot acted in fluttering wing, take-off, and drifting trials.

Indeed, even with harmed DEAs, the maintenance methods empowered the robot to keep up with its flight execution, despite elevation, position, and mentality mistakes that strayed, without a doubt, somewhat from those of an unharmed robot. With a laser medical procedure, a DEA that would have been destroyed had the option to recover 87% of its presentation.
“I need to hand it to my two understudies, who did a ton of difficult work when they were flying the robot. Flying the robot without help from anyone else is exceptionally hard, especially now that we are deliberately harming it,” Chen says.
These maintenance procedures make the little robots considerably stronger, so Chen and his group are currently dealing with showing them new capabilities, such as arriving on blossoms or flying in a multitude. They are likewise developing new control calculations so the robots can fly better, training the robots to control their yaw point so they can keep a steady heading, and empowering the robots to convey a tiny circuit with the longer-term objective of conveying its own power source.
More information: Suhan Kim et al, Laser-assisted failure recovery for dielectric elastomer actuators in aerial robots, Science Robotics (2023). DOI: 10.1126/scirobotics.adf4278. www.science.org/doi/10.1126/scirobotics.adf4278





{kind=link}