Carnegie Mellon researchers have developed open-source programming that allows for more deft development of legged robots.
Robots can assist people with errands like helping with disaster recovery endeavors or checking the weather. On account of quadrupeds, robots that stroll on four legs, their versatility requires numerous product parts to cooperate flawlessly. Most analysts should invest a lot of their energy in creating lower-level frameworks as opposed to zeroing in on undeniably higher ways of behaving.
Aaron Johnson’s group in the Robomechanics Lab at Carnegie Mellon University’s College of Engineering has encountered these disappointments firsthand. Scientists have frequently needed to depend on basic models for their work on the grounds that current programming arrangements were not publicly released, didn’t give a measured system, and needed start to finish usefulness.
In an illustration of development brought about for a specific need, Johnson, an academic partner of mechanical designing, and his group planned their own motion programming stack, Quad-SDK, a full-stack system for spry quadrupedal headway.
The plan can work on the improvement cycle for roboticists wherever it is utilized because it utilizes an open-source permit, meaning the product can be utilized and changed as the client wishes. So analysts don’t need to stress over executing the devices and framework; all things considered, they can get right to chipping away at ways of behaving and applications.
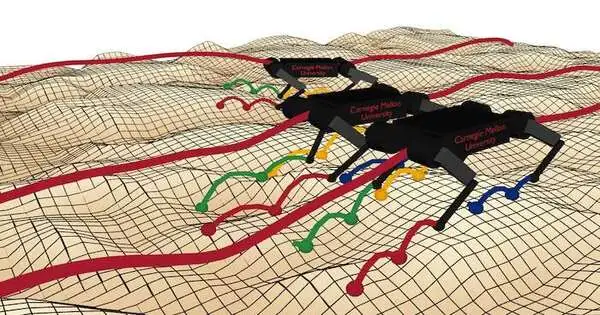
The video shows long skyline arranging and execution, harsh territory versatility, multi-robot support, jump execution, outside route, and that’s just the beginning. Credit: Robomechanics Lab, Carnegie Mellon University
Unlike other options, Quad-SDK is also compatible with the Robot Operating System (ROS).ROS is a middleware, somewhere close to equipment and programming, that lets various pieces of a framework converse with one another. For instance, assuming a robot detects a snag in its way and needs to move data from its discernment module to its dynamic module, ROS empowers that correspondence. Envision an application that doesn’t utilize iOS or Android—it’s a lot easier when everything cooperates.
Motion is a layered issue, as colleague and Ph.D. understudy Ardalan Tajbakhsh depicts it: “To do anything significant on a robot, you want to have a huge number cooperating flawlessly.” Quad-SDK gives a system to mechanical technology scientists and designers to zero in their endeavors on the center calculations rather than the product tooling and framework.
Other programming bundles are truly adept at addressing a single aspect, for example, movement arranging, yet it is critical to have end-to-end systems that provide the necessary calculations, devices, and framework for performing great advanced mechanics research.
The Quad-SDK is full stack, meaning it contains each level of the order that influences quadruped motion, beginning with worldwide preparation. A layer sits at the highest point of the stack; Tajbakhsh looks at it on Google Maps, since it picks where the robot ought to generally go to arrive at its objective. The following layer, nearby organizer, concludes the particulars of the course, similar to where the robot ought to put its feet. This is finished in a third layer, the robot driver, which sends orders to the quadruped’s joints to execute the ideal movement.
In the weeks since Quad-SDK won a Best Paper Award at the Workshop on Legged Robots at the 2022 IEEE International Conference on Robotics and Automation (ICRA), individuals have been mentioning it, a mark of how helpful its answers are and the way that the open-source design welcomes cooperation inside the mechanical technology local area.
More information: Joseph Norby et al, Quad-SDK: Full Stack Software Framework for Agile Quadrupedal Locomotion, IEEE International Conference on Robotics and Automation Workshop on Legged Robots (2022). leggedrobots.org/assets/pdfs/paper19.pdf





{kind=link}