The internal identity in large numbers of us feels a staggering feeling of bliss while coincidentally finding a heap of the fluorescent, rubbery combination of water, salt, and flour that set goo up for life: play batter. (Regardless of whether this happens seldom in adulthood.)
While controlling play batter is fun and simple for 2-year-olds, the vague muck is difficult for robots to deal with. Machines have become progressively solid with unbending items, yet controlling delicate, deformable items accompanies a clothing rundown of specialized difficulties, and above all, likewise with most adaptable designs, in the event that you move one section, you’re probably influencing all the other things.
“Modeling and manipulating items with large degrees of freedom are critical characteristics for robots to learn how to enable complicated industrial and household interaction activities, such as stuffing dumplings, rolling sushi, and producing ceramics,”
Yunzhu Li, CSAIL Ph.D. student
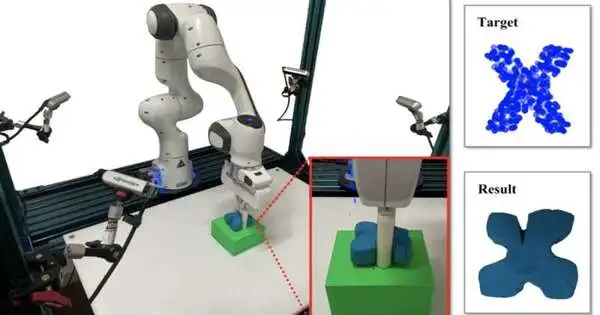
Researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) and Stanford University as of late allowed robots to grasp their hand at playing with the displaying compound, yet not for the good of wistfulness. Their new framework advances straightforwardly from visual contributions to let a robot with a two-fingered gripper see, mimic, and shape raw items. “RoboCraft” could dependably design a robot’s way of behaving to squeeze and delivery play batter to make different letters, including ones it had never seen. With only 10 minutes of information, the two-finger gripper equaled human partners that teleoperated the machine — performing on-par, and on occasion far better, on the tried errands.
“Displaying and controlling items with high levels of opportunity are fundamental abilities for robots to figure out how to empower complex modern and family connection errands, such as stuffing dumplings, moving sushi, and making ceramics,” says Yunzhu Li, CSAIL Ph.D. understudy and creator on another paper about RoboCraft. “While there’s been late advances in controlling garments and ropes, we tracked down that items with high pliancy, similar to batter or plasticine — in spite of omnipresence in those family and modern settings — was a generally underexplored region. With RoboCraft, we gain the elements models straightforwardly from high-layered tactile information, which offers a promising information driven road for us to perform viable preparation.”
With vague, smooth material, the entire design should be represented before you can do any kind of proficient and viable displaying and arranging. By transforming the pictures into charts of little particles, combined with calculations, RoboCraft, involving a diagram brain network as the elements model, makes more exact forecasts about the material’s difference in shapes.
Commonly, analysts have utilized complex physical science test systems to show and comprehend power and elements being applied to objects, yet RoboCraft just purposes visual information. The inward functions of the framework depends on three sections to shape delicate material into, say, an “R.”
The initial segment — insight — is tied in with figuring out how to “see.” It utilizes cameras to gather crude, visual sensor information from the climate, which are then transformed into little billows of particles to address the shapes. A chart based brain network then utilizes said molecule information to figure out how to “mimic” the item’s elements, or the way that it moves. Then, calculations assist with arranging the robot’s way of behaving so it figures out how to “shape” a mass of batter, equipped with the preparation information from the many squeezes. While the letters are a piece free, they’re obviously delegate.
Other than cutesy shapes, the group is (really) dealing with making dumplings from batter and a pre-arranged filling. At this moment, with simply a two finger gripper, it’s a tall order. RoboCraft would require extra devices (a pastry specialist needs various instruments to cook; robots do as well) — a moving pin, a stamp, and a form.
A more far later on space the researchers imagine is involving RoboCraft for help with family errands and tasks, which could be of specific assistance to the old or those with restricted portability. To achieve this, given the numerous blocks that could occur, a considerably more versatile portrayal of the batter or thing would be required, and as well as investigation into what class of models may be reasonable to catch the basic primary frameworks.
“RoboCraft basically shows the way that this prescient model can be learned in very information effective methods for arranging movement. Over the long haul, we are pondering utilizing different devices to control materials,” says Li. “Assuming you ponder dumpling or batter making, only one gripper wouldn’t have the option to tackle it. Helping the model get it and achieve longer-skyline arranging errands, for example, how the batter will twist given the ongoing device, developments and activities, is a following stage for future work.”




