Scientists have taken a huge leap forward in creating bug-estimated bouncing robots equipped for performing undertakings in the little spaces frequently seen in mechanical, rural, and search-and-salvage settings.
Another study led by mechanical sciences and design professor Sameh Tawfick shows a progression of estimated snap bug robots that are small enough to fit into tight spaces, strong enough to move over obstacles, and quick enough to match a bug’s quick departure time.
The discoveries are published in the Public Foundation of Sciences Procedures.
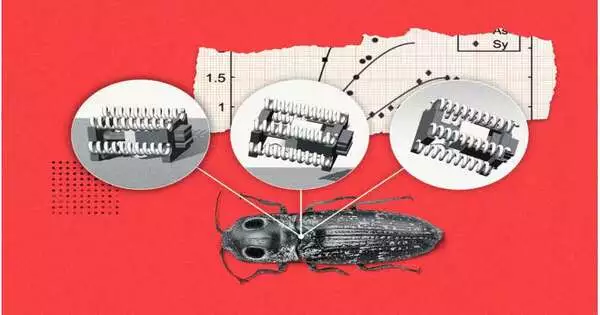
Scientists at the U. of I. and Princeton College have concentrated on click bug life structures, mechanics, and advancement over the course of the last ten years. A recent report found that the snap clasping—the fast arrival of versatile energy—of a looped muscle inside a tick scarab’s chest is set off to permit them to drive themselves in the air, commonly their body length, for the purpose of correcting themselves whenever flipped onto their backs.
“This process, known as a dynamic buckling cascade, is straightforward when compared to the anatomy of a click beetle. However, simplicity is advantageous in this case since it allows us to manufacture and fabricate pieces on such a small scale.”
Mechanical sciences and engineering professor Sameh Tawfick
“One of the stupendous difficulties of limited-scope mechanical technology is finding a plan that is little yet strong enough to move around hindrances or immediately get away from perilous settings,” Tawfick said.
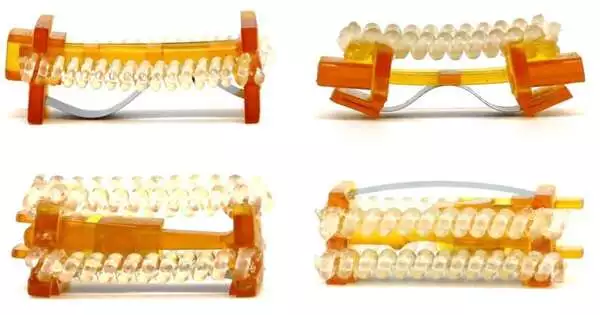
Tawfick and his colleagues used small wound actuators—similar to creature muscles—to draw on a pillar-formed system, causing it to gradually clasp and store versatile energy until it is suddenly delivered and enhanced, propelling the robots vertical.
“This cycle, called a dynamic clasping overflow, is straightforward compared with the life structures of a tick bug,” Tawfick said. “Be that as it may, straightforward is great for this situation since it permits us to work and manufacture parts at this limited scale.”
Mechanical sciences and design teacher Sameh Tawfick drove another review, presenting click bugs that measured robots sufficiently little to squeeze into restricted spaces, adequately strong to move over impediments, and quickly enough to match a bug’s fast break time.
Directed by organic development and numerical models, the group assembled and tried four gadget varieties, arriving at two arrangements that can effectively bounce without manual intercession.
“Pushing ahead, we don’t have a set methodology for the specific plan of the up and coming age of these robots, yet this study sows a seed in the development of this innovation—aa cycle like biologic advancement,” Tawfick said.
The group imagines these robots getting to restricted spaces to assist with performing maintenance on huge machines like turbines and stream motors, for instance, by taking pictures to recognize issues.
“We additionally envision bug-scale robots being valuable in current agribusiness,” Tawfick said. Researchers and ranchers right now use robots and wanderers to screen crops, but once in a while specialists need a sensor to contact a plant or to catch a photo of a tiny scope highlight. “Bug-scaling robots can do that.”
Specialists from the College of Birmingham, UK; Oxford College; and the College of Texas at Dallas additionally participated in this exploration.
The paper is titled “Bug scale bouncing robots empowered by a dynamic clasping overflow.”
More information: Wang, Yuzhe et al, Insect-scale jumping robots enabled by a dynamic buckling cascade, Proceedings of the National Academy of Sciences (2023). DOI: 10.1073/pnas.2210651120. doi.org/10.1073/pnas.2210651120
Journal information: Proceedings of the National Academy of Sciences





{kind=link}