Fake brain networks that are roused by normal nerve circuits in the human body give primates quicker and more exact control of mind-controlled prosthetic hands and fingers, analysts at the University of Michigan have shown. The discovery could lead to more normal control over cutting-edge prostheses for those dealing with the loss of an appendage or loss of motion.
When compared to conventional calculations that did not use brain organizations, the group of designers and specialists discovered that a feed-forward brain network increased top finger speed by 45% during mechanical finger control.This dispelled speculation that more perplexing brain organizations, similar to those used in other fields of AI, would be required to achieve this level of execution improvement.
“This feed-forward network addresses a more seasoned, easier design—wwith data moving just in one direction, from contribution to yield,” said Cindy Chestek, Ph.D., an academic partner in biomedical design at the University of Michigan and the corresponding author of the paper in Nature Correspondences.
“Thus, it was something of a shock to us to perceive how it beat more intricate frameworks.” “We feel that the feed-forward framework’s effortlessness empowers the client to have more straightforward and instinctive control that might be nearer to how the human body works normally.”
According to the first author, Matthew Willsey, M.D., Ph.D., a useful neurosurgery individual at the College of Michigan Wellbeing and Michigan Medication, finely coordinated movements are critical to people, and a lack of this capability can be crushing to individuals with loss of motion.
RK for an irregular finger task. The video catches the typical exhibition of 992’s RK as estimated by throughput (1.4 bps) over the two days of testing for Monkey N, while 993 looks at RK and RN.
“We are extremely motivated to involve the most recent methods in AI to decipher brain action from the mind for the control of apt finger developments,” Willsey said. “We hope that this profession can assist in restoring fine engine operation to those who have lost it.”
High-level prosthetics and mind-computer interfaces are committed to restoring the precise control provided by the human hand to those who have lost motion due to spinal cord injury, stroke, or other wounds and illnesses.Yet, reproducing the normal progression of correspondence between the human brain and a mechanical prosthetic—with speed and accuracy—remains a hindrance.
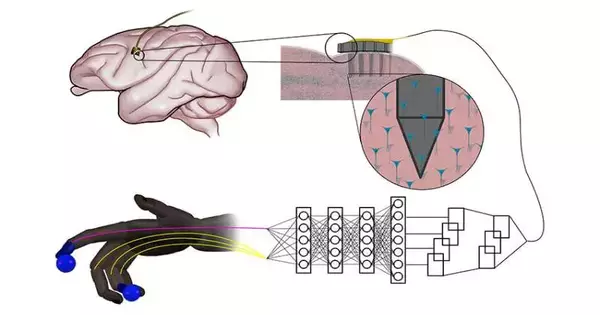
Man-made brain organizations, for example, can reproduce the cut-off association between the mind and spinal line in spinal cord injury by utilizing anodes to catch motivations from the cerebrum, deciphering them with computerized reasoning, and utilizing this to control prosthetic hands or vivify the local appendage.
Yet, in terms of figures, the feed-forward brain network model is believed to be less strong for the majority of advanced applications that utilize repetitive brain organizations. Rather than passing contributions along a one-way street, the hubs in repetitive organizations have their own elements—the capacity to make their own inner cycles through criticism, making them fit for retaining and replaying groupings. This works well when you’re anticipating developments from recently recorded brain data, relying on certain specialists to accept that this will remain similar during new tests.
That’s what Chestek said; truly, the intricacy of repetitive organizations for direct engine control appeared to “battle the client.”
“There are only a few neurons and two or three neurotransmitters between the engine cortex of the brain and hand developments in the human body,” she explained.”There isn’t a lot of handling vital there, and the feed-forward brain organization may more closely resemble the normal framework.”
The group believes that their findings will aid in moving forward future exploration that can work on the speed and precision with which exceptional prosthetics respond to the mind’s motivations.
“While developing this calculation, we attempted to adhere to Einstein’s famous planning rule that “everything ought to be made as simple as possible, yet not simpler,” Willsey said.
“Our calculation needs to have sufficient intricacy to grasp the perhaps non-direct connection between the electrical signs of the mind and a client’s planned finger developments.” Nonetheless, the calculation may one day be essential for a completely implantable mind machine interface framework that reestablishes development to individuals with loss of motion, and pointless intricacy might pressure these future frameworks in unwanted ways, for example, by shortening battery duration.”
“At the College of Michigan, we are lucky to have a huge gathering of designers, neuroscientists, and development specialists who collaborate together in a culture of cooperation to push the field of helpful neuroengineering ahead,” said Parag Patil, M.D., Ph.D., a senior creator of the review and an academic partner of neurosurgery at the College of Michigan Clinical School. “Part of the energy of this work is that these calculations can be very quickly made at the bedside to help human exploration patients.”
More information: Matthew S. Willsey et al, Real-time brain-machine interface in non-human primates achieves high-velocity prosthetic finger movements using a shallow feedforward neural network decoder, Nature Communications (2022). DOI: 10.1038/s41467-022-34452-w
Journal information: Nature Communications




