

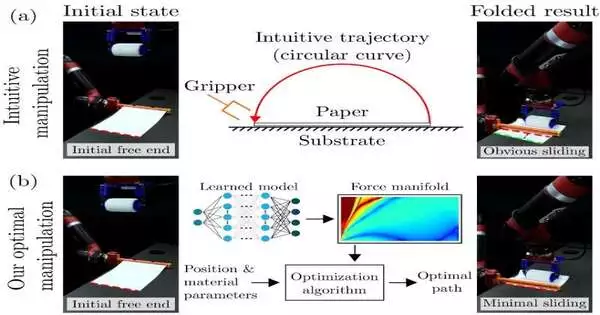
To handle different errands, robots ought to have the option to deal with and control various items and materials, including paper. While roboticists have successfully worked on the ability of humanoid robots or mechanical grippers to deal with a variety of materials, paper collapsing remains a little-studied topic in the mechanical technology field. An exploration group at the University of California, Los Angeles (UCLA) has as of late made another computational structure that permits a robot to handle paper collapsing and the Oriental specialty of origami. This structure, presented in a paper pre-distributed on arXiv, consolidates a profound learning calculation