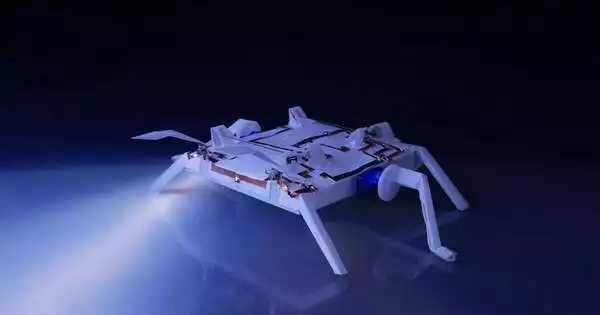




Researchers have created resilient artificial muscles that can help insect-scale aerial robots recover flight performance after severe damage. Bumblebees have clumsy flight abilities. A foraging bee is estimated to collide with a flower once every second, causing damage to its wings over time. Bumblebees can fly despite having many tiny rips or holes in their wings. Aerial robots, on the other hand, are not as tough. Poke holes in the robot's wing motors or cut off a section of its propellor, and it will almost certainly be grounded. Inspired by the toughness of bumblebees, MIT researchers developed repair techniques that