By interfacing little self-driving toys in a chain, specialists at the UvA Organization of Physical Science have tracked down the way to concentrate on the development of minuscule life forms and sub-atomic engines inside our cells.
Vibrations are what propel Hexbug Nano v2 microbots forward. By interfacing a few of these toys with a versatile silicon elastic chain, the subsequent design is “elastoactive.” This indicates that it will revert to its original form after being deformed, despite the active, self-propelling components of the structure constantly attempting to move it in a particular direction.
The elastoactive chains displayed a variety of movement types, including self-oscillatory, self-synchronizing, and self-snapping, depending on the size of the chain links and whether the chains were fixed at one or both ends.
“By testing with these elastoactive chains, we found that activity and elasticity interact: when activity predominates, the chains self-oscillate and synchronize.”
Corentin Coulais, head of the Machine Materials Laboratory at the University of Amsterdam.
“We discovered that activity and elasticity interact by experimenting with these elastoactive chains: at the point when action rules, the chains self-sway and synchronize,” says Corentin Coulais, head of the Machine Materials Research Center at the College of Amsterdam.
He proceeds, “Mechanical self-wavering and synchronization are vital components of organic machines, including those that are valuable for making new kinds of independent robots. We can really identify the nature of these nonlinear phenomena thanks to these active chains.
The results have been published in the Physical Review Letters journal.
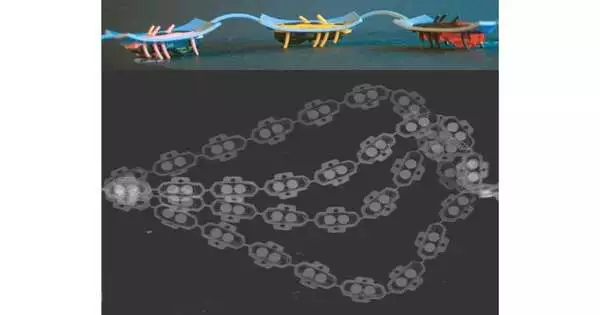
The self-snapping behavior of a chain that is pinched at both ends, the self-synchronizing behavior of two chains that are coupled by a stiff rod, and the self-oscillatory behavior of an elastoactive chain that is pinched at one end Credit: Ellen Zheng
Self-wavering, self-synchronization, and self-snapping
At the point when a design self-sways, this implies that it twists to and fro without anyone else. The microbots might begin by bending the chain to the leftt twists to and fro without anyone else. The microbots might begin by bending the chain to the left. However, the elastic links of the chain, which are pinned at one end, resist this movement, reorienting the bots so that they begin to push and bend the chain to the right. The elastic chain will once again resist this movement until the bots start moving again to the left.
When a sufficiently stiff rod joins two elastoactive chains at one end, synchronization occurs. Like sea grasses moved by the same waves, the two connected chains automatically begin wriggling around and oscillating at the same frequency.
Finally, it exhibits “self-snapping” behavior by taking a single elastoactive chain and pinning both ends. By pressing sufficiently from the side, you can make a playing card bend in the opposite direction by using your fingers. This is carried out by the elastoactive chains on their own, repeatedly snapping from bending to the right to the left.
Play that teaches:
“We started this research by just playing with the toys with microbots.” However, the overall goal was to investigate materials that were not in equilibrium. According to Coulais, active fluids in soft matter have received a lot of attention over the past 25 years, but their solid counterparts have received much less attention.
The next thing on the agenda is looking into elastoactive behavior at smaller scales, like in so-called colloidal systems, which are fluids with tiny particles suspended in them. Despite the fact that these are not yet model frameworks, they are closer to the natural framework because of comparative length scales and the presence of liquid. Using smart design, multiple self-oscillations could be incorporated into a single structure at any scale to produce more complex movement patterns. It is hoped that new kinds of autonomous robots will be possible with a better understanding of self-oscillations.
More information: Ellen Zheng et al, Self-Oscillation and Synchronization Transitions in Elastoactive Structures, Physical Review Letters (2023). DOI: 10.1103/PhysRevLett.130.178202




