Elythor, an EPFL spin-off, has fostered another robot whose wing shape can adjust to wind conditions and flight position continuously, diminishing the robot’s energy utilization. Additionally, the drone can change its wing position, allowing it to fly either horizontally or vertically. Because of these characteristics, it is an ideal candidate for power plant inspection.
People have been fascinated by the ease with which birds fly for centuries. Their instinctual capacity to utilize wind for their potential benefit roused Morpho, the new investigation drone created by Elythor. Morpho is a hybrid unmanned aerial vehicle (UAV) that is both a quadcopter and a winged drone and can adapt to the situation.
Morpho’s versatile wings expand the robot’s flight time and give it more prominent mobility. It is ideal for inspecting power plants and other infrastructure like wind turbines, gas pipelines, offshore oil platforms, and high-voltage power lines due to its ability to fly in both enclosed and open environments when combined with embedded sensors and cameras.
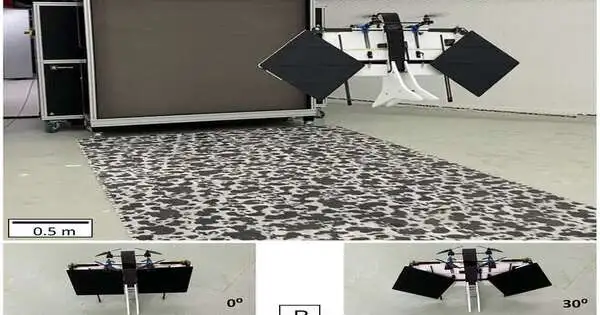
Credit: Ecole Polytechnique Federale de Lausanne Cutting costs by a third and shortening the time it takes to inspect Morpho’s four legs gives it the shape of a small rocket. However, that rapidly changes once its rotors begin buzzing. Because the drone can take off vertically, it can be used in tight spaces, fly within a few centimeters of a piece of equipment, and inspect it without hitting it.
Morpho can quickly shift its motors, rotate into a horizontal, more aerodynamic position after the inspection is finished, and fly to the next inspection site. In the event that the robot experiences solid or quickly changing breezes en route, it will grow or get its wings as it is important to keep up with its direction. When the wind is right, it can also glide. All of this means that inspections take less time and the drone can fly for longer.
“Winged drones have longer flight times, whereas quadcopters have better maneuverability. We merged the two and developed an adaptive wing mechanism to further reduce the drone’s power requirements.”
Harry Vourtsis, Elythor co-founder and CEO.
Harry Vourtsis, co-founder and CEO of Elythor, claims, “We calculated that using Morpho can cut the time and cost of a drone inspection by an average of 35%.” When Morpho gets to the next inspection site, it can fly right up to the equipment by folding its wings and returning to a vertical position. On their drone, Vourtsis and colleagues have written an article for Advanced Intelligent Systems.
According to Vourtsis, “Winged drones have the advantage of longer flight times, while quadcopters have better maneuverability.” Asymmetric wing adjustment provides stability in strong winds. We joined the two and added an adaptative wing framework that diminishes the robot’s power necessity significantly further.” The majority of fixed-wing vertical take-off and landing (VTOL) drones are a compromise because their wings are large enough to provide sufficient lift during horizontal flight while being small enough to reduce friction during vertical flight. Due to their large surface area perpendicular to the wind, VTOL drones also struggle to take off and land in strong winds.
Morpho’s wing control framework is the consequence of quite a bit of exploration at EPFL’s Lab of Shrewd Frameworks and has been portrayed in various logical articles. A software program and a set of sensors are connected to the system to keep an eye on wind speed and direction.
“The controller automatically selects whether to hold the wings in place or let them move freely with the wind, based on the trajectory and effective speed of the drone, as well as any changes in wind direction,” Nathan Müller, another co-founder of Elythor, says. The wings’ surface region can likewise be changed either evenly or unevenly, depending upon wind heading.”
The calculations fueling the control framework look not simply to improve the compromise between air erosion and lift but additionally to limit power use. Using wind currents to allow the drone to glide or asymmetrically adjusting the wings to control its yaw—or rotation around its vertical axis—are examples of this. This gives more noteworthy dependability in heavy breezes.

Harry Vourtsis, CEO and co-founder, and Nathan Müller, co-founder of the start-up. Credit: EPFL/Alain Herzog
Quantitative investigations done at the EPFL lab show that Morpho conveys significantly better mobility and power proficiency. “Our plan can decrease power use by up to 85% when the robot is flying in the upward position,” says Müller. “In addition, it significantly enhances the drone’s stability and attitude.” These advantages mean Morpho can perform examinations under a more extensive scope of weather patterns.
Harry Vourtsis, president and fellow benefactor, and Nathan Müller, prime supporter of the beginning up Credit: “We want to revolutionize inspection platforms,” says Alain Herzog of EPFL. “Elythor is also developing software for compiling and analyzing the data collected by Morpho because it aims to provide customers with a turnkey solution. “We need to upset the investigation stages,” says Vourtsis. Depending on the equipment to be inspected, power plant operators use a variety of drones today. Wind turbines and transmission towers, for example, are among the complex structures that must be entered into the facilities, which can extend over several kilometers.
In the coming months, Elythor intends to get its drone ready for industrial production, with a market launch planned for the end of this year.
More information: Charalampos Vourtsis et al, Wind Defiant Morphing Drones, Advanced Intelligent Systems (2023). DOI: 10.1002/aisy.202200297
Charalampos Vourtsis, Resilient drones with morphing wings, Lausanne, EPFL (2023). DOI: 10.5075/epfl-thesis-9682
Charalampos Vourtsis et al, Robotic Elytra: Insect-Inspired Protective Wings for Resilient and Multi-Modal Drones, IEEE Robotics and Automation Letters (2021). DOI: 10.1109/LRA.2021.3123378




