Specialists at the Crossbreed Advanced Mechanics Gathering at UC Berkeley, Simon Fraser College, and Georgia Establishment of Innovation have as of late developed a support learning model that permits a quadrupedal robot to play soccer in the job of goalkeeper proficiently. The model presented in a paper pre-distributed on arXiv works on the robot’s abilities over the long run, through an experimentation cycle.
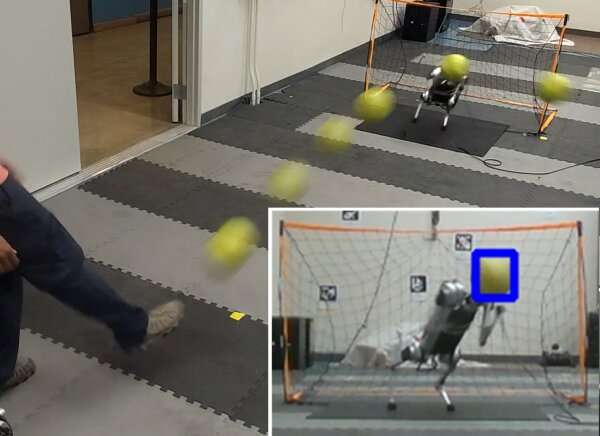
“By allowing quadrupeds to play soccer, we can stretch the boundaries of the man-made reasoning of athletic legged robots,” Xiaoyu Huang, Zhongyu Li, Yanzhen Xiang, Yiming Ni, Yufeng Chi, Yunhao Li, Lizhi Yang, Xue Container Peng, and Koushil Sreenath, the scientists who completed the review, told TechXplore. “Goalkeeping is a fascinating, however testing task that requires the robot to respond to the quick ball, in some cases flying in the air, and block it, involving dynamic moves in an exceptionally short measure of time (as a rule, one second or less). By addressing this, we can, along these lines, gain an understanding of how to make astute and dynamic legged robots. “
The critical target of the new work by Huang and his partners was to make a four-legged robot goalkeeper that can consummate its abilities as it plays, similarly as a human goalkeeper would. To do this, the specialists fostered a support learning model that prepares the robot by means of an experimentation cycle, instead of through a fixed, human-designed technique.
“The robot first learns several locomotion control strategies to perform specific tasks such as sidestepping, diving, and jumping while tracking randomized toe trajectories. After reviewing the detected ball position and the robot’s states, the robot learns a high-level planning policy based on these control rules to determine an ideal skill and motion to intercept the ball.”
Xiaoyu Huang, the researchers who carried out the study
The robot initially learns different velocity control arrangements to perform unmistakable abilities, like avoiding, plunging, and bouncing, while following randomized directions for the robot’s toes,” the analysts made sense of. “In light of these control strategies, the robot then, at that point, learns an undeniable level of arranging strategy to choose an ideal expertise and movement to block the ball subsequent to looking at the recognized ball position and the robot’s states.”
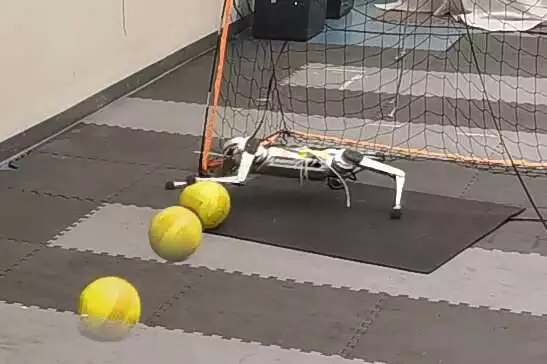
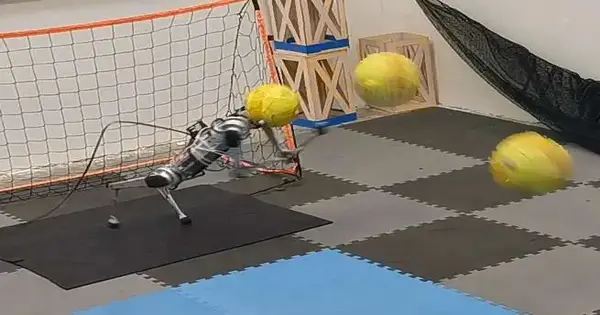
The specialists prepared their support learning model in a progression of soccer match reproductions. Hence, they conveyed the strategies they learned on the Small Scale Cheetah, a genuinely quadrupedal robot created at the Massachusetts Establishment of Innovation (MIT), and tried its presentation in reality.
The support learning system made by Huang and his partners was found to work on the capacities of the Small Cheetah robot as a soccer goalkeeper enormously. In the group’s true tests, the robot had the option to save 87.5% of 40 irregular shots.
“I feel that the coolest part of our work is that, utilizing our proposed technique, the quadrupedal robot The smaller than expected Cheetah can perform extremely unique and spry headway abilities, like bouncing and jumping, as well as quick and exact control abilities, for example, driving the ball away involving its swinging legs in an exceptionally short measure of time, “the specialists said. “This really pushes the limits of legged movement, demonstrating the way that the leg can likewise be a controller, very much like it tends to be for people.”

Later on, the support learning model made by this group of scientists could be utilized to work on the exhibition of robots intended to partake in RoboCup and other mechanical soccer contests. Likewise, their model could be used to improve the dexterity and actual capacities of quadruped robots intended to handle a wide range of tasks, including investigation and salvage missions.

“We trust that we can empower quadrupedal robots to rival human soccer players soon,” the specialists added. “The robots need to perform a wider assortment of dynamic and coordinated movements and achieve more knowledge in the soccer match.”

More information: Xiaoyu Huang et al, Creating a dynamic quadrupedal robotic goalkeeper with reinforcement learning.
arXiv:2210.04435v1 [cs.RO], arxiv.org/abs/2210.04435





{kind=link}