To best move in their general climate and tackle ordinary undertakings, robots ought to have the option to perform complex movements, successfully planning the development of individual appendages. Roboticists and PC researchers have subsequently been attempting to foster computational strategies that can falsely recreate the interaction through which people plan, execute, and coordinate the development of various body parts.
An examination bunch based at Intel Labs (Germany), College School London (UCL, UK), and Stanzas Exploration Lab (US) as of late decided to investigate the engine control of independent robots utilizing progressive generative models, computational strategies that sort out factors in information into various levels or orders, to then impersonate explicit cycles.
Their paper, distributed in Nature Machine Knowledge, shows the viability of these models for empowering human-motivated engine control in independent robots.
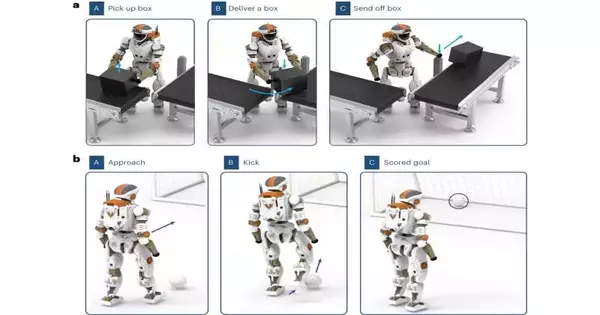
“In this paper, we show how a full-body humanoid robot can transport boxes, open doors, operate facilities (e.g., conveyor belts) within a warehouse setting, play soccer, and even continue operation despite physical damage to the robot body. Our research demonstrates the power of nature, demonstrating how the inspiration of how different cortexes work together in our brain can aid in the design of intelligent robot brains.”
Assoc Prof Zhibin (Alex) Li
“Our new paper investigates how we can draw motivation from organic insight to formalize robot learning and control,” Zhibin (Alex) Li, the creator of the paper, told Tech Xplore.
“This takes into consideration regular movement arranging and exact control of a robot’s developments inside an intelligible structure. We accept that the development of engine knowledge is definitely not an irregular mix of various capacities. The construction of our vision cortex, language cortex, engine cortex, etc. has a more profound and designed justification for why such a system for interfacing different brains by and large can work successfully and effectively.”
The new concentrate by Assoc Prof Zhibin (Alex) Li and recognized neuroscientist Prof Karl Friston FMedSci FRSB FRS draws motivation from neuroscience research, explicitly explaining why organic knowledge and engine control in people at present are known. Involving the human mind as a kind of perspective, the group created programming, AI, and control calculations that could work on the capacity of independent, savvy robots to get done with complex day-to-day jobs dependably.
“In this paper, we have exhibited this with our broad reproduction, where a full-body humanoid robot can move boxes, open entryways, work offices (e.g., transport lines) inside a stockroom setting, play soccer, and even proceed with activity under actual harm to the robot body,” Li said. “Our review exhibits the force of nature, where the motivation of how various cortexes cooperate in our cerebrum can help the plan of shrewd robot minds.”
The method developed by Li and his colleagues organizes a task into various levels, or hierarchies, just like other hierarchical generative models. In particular, the group’s model guides the overextending objective of an undertaking onto the execution of individual appendage movements at various time scales.
Li explained, “The generative models predict the consequences of different actions, thereby assisting in solving different types and levels of planning and correctly mapping different robot actions, which is fairly difficult and tedious.”
“For instance, conveying a case starting with one spot then onto the next will normally guide to a worldwide and coarse arrangement of strolling towards the objective, along with all the more close checking and fine controlling of equilibrium, as well as conveying the containers and putting the crates—every one of these mind-boggling coordinations will happen normally simultaneously utilizing our product.”
The specialists assessed their methodology in a progression of recreations and found that it permitted a humanoid robot to independently follow through with a perplexing job that involves a blend of activities, including strolling, getting a handle on objects, and controlling them. In particular, the robot could recover and move a container while opening and strolling through an entryway and kicking away a football.
“One of the most remarkable discoveries of our new work is that taking motivation from nature can be a generally excellent beginning stage,” Li said.
“We can get motivation at the authoritative degree of similarity of our cerebrum and guide our plan of the robot mind, as opposed to beginning a design plan without any preparation. There is a decent measure of design work that has been concocted freely from bio-enlivened approaches, but we don’t yet have keen robots that can take care of responsibilities cleverly like us, utilizing just a little energy, like polishing off bread and water. Nowadays, on the other hand, robots do simple things with a lot of power and computing.”
The underlying discoveries accumulated by Li and his associates are profoundly encouraging, featuring the capability of various leveled generative models for moving human abilities to robots. Future tests on a large number of actual robots could assist in encouraging approval of these outcomes.
Li continued, “At this point in human history, we have collectively done a tremendous amount of work to replicate various kinds of human-level intelligence separately that are equivalent to various parts of the human brain.” Presently, we can attract motivation from the natural cerebrum in terms of design and the authoritative degree of functionalities in regards to how various cortexes coordinate with one another. Then we can plan a fake cerebrum in light of how the human mind functions at the practical level.”
The new work by this group of specialists adds to the continuous endeavors of typified artificial intelligence pointed toward carrying the abilities of robots closer to those of people. Li and his partners intend to keep executing their proposed approach for genuine robot-coordinated movements for complex assignments and expanding its cultural potential.
Li went on to say, “This study leads us to a viable path toward building up AGI (artificial general intelligence) with embodied physical robots and abilities as a new form of productive forces that can bring our civilization toward a brighter future, under good and positive governance from society and scientific communities.” In our next examinations, we will keep pursuing satisfying this desire.”
More information: Kai Yuan et al. Hierarchical generative modelling for autonomous robots, Nature Machine Intelligence (2023). DOI: 10.1038/s42256-023-00752-z




