Another study by Missouri S&T experts shows how human subjects solidify or loosen their arms at various points during a walk while connected at the hip with a robot guide.The analysts’ examination of these developments could help with the plan for more intelligent, more humanlike robot guides and collaborators.
“This work presents the primary estimation and examination of human arm solidity during an overground actual connection between a robot chief and a human devotee,” the Missouri S&T specialists write in a paper as of late distributed in the journal Logical Reports.
The lead analyst, Dr. Yun Seong Melody, right-hand teacher of mechanical and advanced plane design at Missouri S&T, depicts the discoveries as “an early move toward fostering a robot that is humanlike when it truly interfaces with a human accomplice.”
“In this work, a robot leader and a human follower engage in overground physical interaction, and for the first time, human arm stiffness is measured and analyzed,”
the Missouri S&T researchers write in a paper recently published in the journal Scientific Reports.
“This is connected with having assistive robots that can flawlessly associate with us,” Melody says.
People as often as possible cooperate with each other without verbal correspondence or even obvious signals while carrying out specific errands, for example, when one individual helps another walk or several people dance in three steps. The scientists depict the powers that become possibly the most important factor when a mechanical aide walks with people along three distinct directions in their Logical Reports paper.
“From the beginning, actual communication is a unique undertaking with power trades directed by the latent properties of the connecting being,” Melody says. “In any case, assuming you analyze how people handle actual cooperation, you understand that there must be consistent handling of data and decision-making to construe each other’s purpose.” Revealing the system through which this happens will assist us in planning future robots that can consistently interface with their human accomplices.
“Indeed, even without expressly shared objectives, two human accomplices can truly connect with one another to perform cooperative errands,” write Tune and his kindred Missouri S&T specialists, Dr. Devin Consumes, an academic partner in mental science, and Dr. Sambad Regmi, who will procure a Ph.D. from S&T in May 2022. Consumes helped plan the examination and “thoroughly deciphered the information” while co-tutoring Regmi, Melody says.
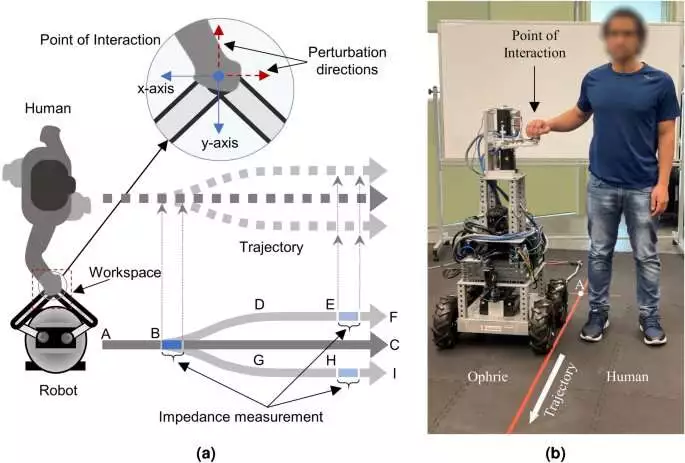
(a) Schematics of the overground pHRI tunnel arrangement (top view). The even lengths of stomach muscle in BC, BD/BG, DE/GH, and EF/Hello are 1.5 m, 3.95 m, 1.25 m, 1.85 m, and 0.85 m, individually. D and G (and subsequently F and I) were 0.5 m apart. (b) A member of the research faculty holding the robot handle to demonstrate the posture at the start of a preliminary.
The experts used their recently developed intuitive robot, Ophrie, to mimic a directed walking task that required the human subjects to close their eyes while holding the robot’s arm.Ophrie—an abbreviation for Overground Actual Human Robot Cooperation—was modified to continue on a straight direction for the first 1.5 meters of the walk (about 5 feet), then veer off either to the left or right or proceed with the straight direction. The subjects were supposed to respond to haptic signals conveyed through the handle to detect the robot’s development.
The S&T specialists estimated arm solidity at two focuses during the walk: either when the robot could take one of three disparate directions, so all in all the human subjects were less sure of the way, or toward the finish of the walk, when subjects were more sure of the robot’s way.
“We saw that the arm firmness was lower at moments when the robot’s forthcoming direction was obscured compared with moments when it was unsurprising,” the scientists write. This presents “the main proof of arm firmness adjustment for better engine correspondence during overground actual cooperation.”
Ten human subjects in their mid-20s took part in the examinations. Nine of the 10 were male, one was left-handed, and none announced any neurological problems.
Understanding this cooperation among people and robots can prompt upgrades in the robot plan, Melody says. An intuitive robot collaborator could be utilized in senior consideration, active recuperation, and other fields.
“Like a human accomplice, these robots would assist a construction worker with conveying loads or an older individual with versatility issues stroll from the room to the kitchen,” Tune says. “We maintain that these robots should be viable in their presentation, natural to utilize and speak with, and protected to cooperate with, all while keeping in touch with their human accomplices.”
More information: Sambad Regmi et al, Humans modulate arm stiffness to facilitate motor communication during overground physical human-robot interaction, Scientific Reports (2022). DOI: 10.1038/s41598-022-23496-z
Journal information: Scientific Reports , Nature





{kind=link}