Imagine an existence where sci-fi meets reality, where state-of-the art innovation rejuvenates the stunning scenes from motion pictures like Prometheus. This is the pivotal examination driven by Dr. Fu Zhang, Collaborator Teacher of the Division of Mechanical Designing at the Staff of Designing, the College of Hong Kong (HKU), who has fostered a controlled flying ultra-underactuated LiDAR-detecting ethereal robot (PULSAR) that is ready to reclassify the universe of unpiloted elevated vehicles (UAVs).
Search and rescue, cave surveying, and architectural mapping already greatly benefit from the use of unmanned aerial vehicles (UAVs). The PULSAR, appropriately named for its similitudes to a galactic pulsar’s self-turn and filtering design, takes UAV innovation higher than ever. With a miniature PC and a LiDAR sensor, PULSAR flaunts full locally available discernment, planning, arranging, and control capacities in both indoor and outdoor conditions, all without requiring any outer instruments.
The single actuator that powers the swashplateless mechanism and provides thrust and moment is the key to PULSAR’s incredible functionality. Dr. Zhang’s team demonstrated through a series of experiments that PULSAR can autonomously navigate in complete darkness, track complex trajectories, and detect static and dynamic obstacles in real time.
“We believe it will aid research into UAV control methods involving high-speed rotation and simultaneous localization and mapping (SLAM) techniques involving aggressive motion.”
Dr. Fu Zhang, Assistant Professor of Department of Mechanical Engineering at the Faculty of Engineering,
PULSAR’s heartiness likewise reaches out to enduring outer breeze aggravations, empowering more secure and steady trips in eccentric circumstances. At a maximum breeze speed of 4.5 m/s, Pulsar can keep up with its drift position inside a small region. Such a trademark empowers a more secure and stable trip in a wild climate.
The sensor can also extend the field of view (FoV) through self-rotation, which improves the UAV’s perception and task efficiency in addition to the aforementioned capabilities. As of now, there are two principal approaches for broadening the sensor FoV, yet the two of them consume a lot of force.
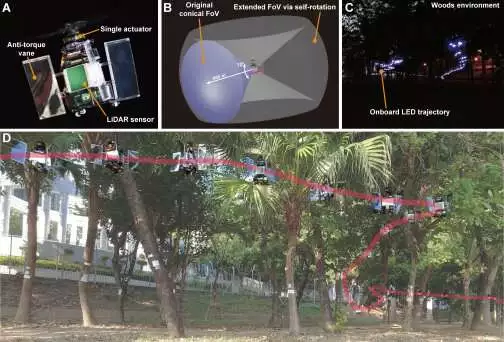
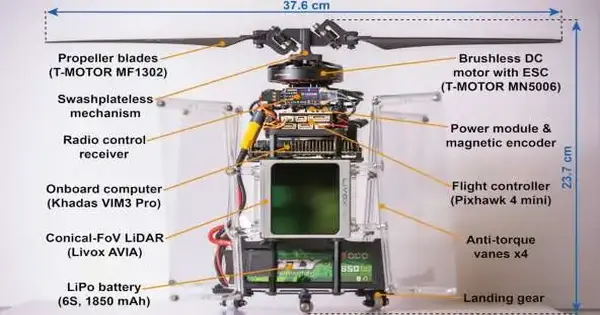
The main structure of PULSAR, its extensive sensor field of view, and autonomous navigation flight in a wooded environment are all shown in this overview. Credit: The University of Hong Kong
The main methodology includes utilizing sensors with huge FoVs, like fisheye cameras, catadioptric cameras, or 360° LiDAR, which will generally create twists. However, the vertical FoV of 360° LiDAR is narrow and of low resolution. The subsequent methodology includes utilizing different sensors, for example, a multi-camera or multi-LiDAR framework; however, this causes extra expenses and results in longer information handling times.
When compared to a quadrotor unmanned aerial vehicle (UAV) with the same propeller disk area and payload, PULSAR’s invention can conserve 26.7% of energy while maintaining good agility. Because of its single actuator impetus framework, PULSAR encounters less energy change misfortune, bringing about a high flight productivity of 6.65 g/W.
Notwithstanding its little size, with a measurement of just 37.6 cm and a battery limit of only 41 Wh, this 1234-g UAV accomplished a drift season of north of 12 minutes. The hover time of PULSAR can be increased to over 40 minutes by replacing the LiDAR sensor with a larger propeller and battery.
The examination finding is introduced in Science: Mechanical Technology.
Dr. Zhang said that the research platform that his team built might be good for looking into self-rotating UAVs more. It will, in our opinion, make it easier to study UAV control strategies for aggressive motion and simultaneous localization and mapping (SLAM) strategies for high-speed rotation.”
More information: Nan Chen et al, A self-rotating, single-actuated UAV with extended sensor field of view for autonomous navigation, Science Robotics (2023). DOI: 10.1126/scirobotics.ade4538





{kind=link}