A little group of mechanical specialists at Carnegie Mellon College, working with a partner from the College of Illinois Urbana-Champaign, has planned and fabricated what they portray as the most straightforward strolling robot of all time. They have composed a paper portraying the thoughts they used to construct the robot and the variables that have prompted its effortlessness and have posted it on the arXiv preprint server.
Throughout recent years, advanced mechanics engineers have been making progress toward making robots that can stroll on two legs and do as such as easily as creatures or people. Hitherto, such endeavors have demonstrated productivity, yet a definitive objective presently can’t seem to be accomplished. Robots actually walk like robots.
As work has advanced on planning strolling robots, a great deal of design has developed, including engines, power through pressure, handling chips, and different pieces and parts. The outcomes would, in general, be astoundingly convoluted, refined, and costly. Thus, many have contemplated whether there probably won’t be a less confounding method for getting things done. In this new endeavor, the exploration group has adopted a completely new strategy for the issue and, in this manner, has figured out how to extraordinarily work on the elements expected to permit a robot to stroll on two legs.
The work of the group was enlivened by the work done by Canadian specialist Bit McGeer—back in the last part of the 1980s, he fabricated a basic robot that had no engines, actuators, or PCs to control its developments. All things considered, it included a plan that permitted a robot to lope down a marginally slanted plane with a simple step. This was made conceivable, the scientists note, by utilizing equilibrium and gravity in the plan.
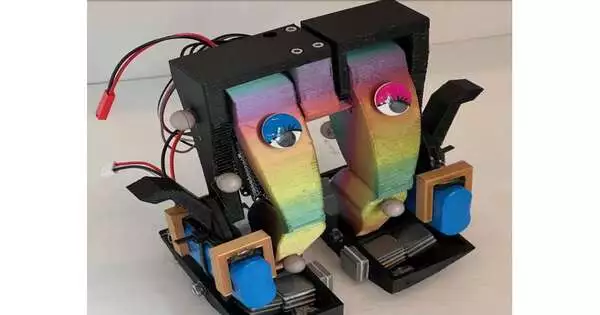
In investigating such a methodology, the scientists on this new endeavor planned a comparative robot that could stroll on a level surface with the use of only one actuator. Their thought was to fabricate a robot made of only legs linked together that could walk. The outcome was a robot they named Mugatu.
It has two legs, associated together at the top. Every leg has a foot on the base end, but no knee. Every one of its parts was intended to exploit gravity—the feet, for instance, were molded so that they permit the robot to move to and fro in addition to going marginally aside or the other.
The legs were likewise assembled such that the robot’s focal point of gravity was generally beneath the focal point of curve for each foot. That actually intended that, assuming the robot went shaky, it would constantly move back to an upright position. They likewise added another element: while remaining with feet together, the robot would constantly incline somewhat in reverse, permitting a leg to lift while never destroying it.
The eventual outcome is a robot with its parts adjusted together in a manner that guarantees it can stroll without falling while at the same time involving only one actuator as a power source. The plan additionally ended up being profoundly effective, energy-wise. The group closes by recommending that their plan is only the most vital phase in the formation of another kind of bipedal robot—one that depends more on leg plans than on ways of moving them.
More information: James Kyle et al, The Simplest Walking Robot: A bipedal robot with one actuator and two rigid bodies, arXiv (2023). DOI: 10.48550/arxiv.2308.08401




