Metamaterials are evolving fast from electromagnetic, acoustic, or mechanical properties that are governed by structure rather than composition. Mechanical metamaterials in particular have been created to exhibit better mechanical qualities such as ultrahigh stiffness and strength-to-weight ratio, as well as unique properties such as a negative Poisson’s ratio and a negative coefficient of thermal expansion.
Using the power of computer algorithms, a new study challenges the standard method to building soft robotics and a type of materials known as metamaterials. Researchers from the University of Illinois Urbana-Champaign and the Technical University of Denmark can now create extremely efficient actuators and energy absorbers that replicate natural designs without relying on human intuition or trial-and-error.
The research, directed by Illinois civil and environmental engineering professor Shelly Zhang, employs optimization theory and a topological optimization algorithm-based design method. The design technique, also known as digital synthesis, creates composite structures that can precisely produce complex prescribed mechanical responses.
What we discovered is extremely astounding in that it is very much aligned with what biology and evolution develop naturally. For example, when we asked the algorithm to create a device with faster stiffening responses, it responded with larger ‘muscles’ on our mechanical frogs, precisely like it might happen in nature.
Professor Shelly Zhang
The findings of the study have been published in the Proceedings of the National Academy of Sciences. “The complicated mechanical reactions required in soft robotics and metamaterials necessitate the usage of several materials – yet constructing these types of structures can be difficult,” Zhang explained. “There are so many materials to pick from, and determining the ideal combination of materials to meet a certain function confronts a researcher with an overwhelming amount of data to process.”
Zhang’s team set out to create macroscale structures with the specified qualities of rapid stiffening, large-scale deformation buckling, multiphase stability, and long-lasting force plateaus. The innovative digital synthesis technique created structures with ideal geometric properties made of the best materials for the specified functions.
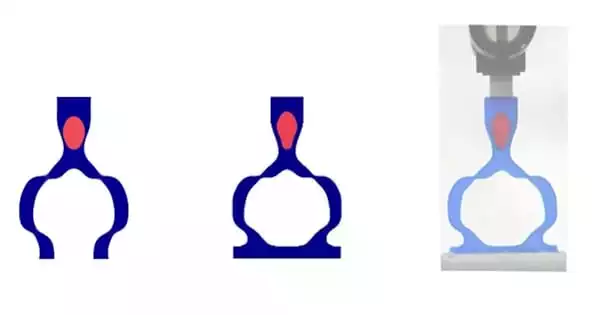
Researchers created model devices out of two different polydimethylsiloxane, or PDMS, elastomers with a basic geometry that resembles the legs of a frog — or a family of three frogs with different geometries that use the two PDMS elastomers in various arrangements that function very much like biological muscle and bone.
“What we discovered is extremely astounding in that it is very much aligned with what biology and evolution develop naturally,” Zhang added. “For example, when we asked the algorithm to create a device with faster stiffening responses, it responded with larger’muscles’ on our mechanical frogs, precisely like it might happen in nature.”

According to Zhang, the work’s overall strengths are found in its sustainability characteristics. “We created reusable and fully recoverable energy dissipators to meet today’s demand for environmentally friendly gadgets. These are not one-time-use devices. We developed them with solely elastic materials, allowing us to reuse them multiple times” she stated.
According to the researchers, this digital synthesis technique will broaden the variety of programmable metamaterials capable of handling complicated, previously inconceivable mechanical reactions, particularly in soft robotics and biomedical devices. This study was funded by the National Science Foundation and the Villum Foundation. Zhang is also linked with the mechanical science and engineering departments of Illinois.
Using such sophisticated metamaterials in advanced soft robots could result in paradigm shifts in the design, construction, and perception of future intelligent machines. Soft robot designers will be able to use conformable monolithic systems that can endure sophisticated motion directly designed inside the architecture of the mechanical metamaterial instead of building individual actuators.
Soft robots that can translate a basic input, like as a pressure impulse, into a complex sequence of flexion, tension, and torsion outputs are made possible by the use of such programmable metamaterial systems. The ability to encode morphing information in the metamaterial structure also enables such architected actuators to accomplish complex tasks with less input energy than conventional counterparts.
Using a metamaterial approach to soft machine design significantly enhances the amount of degrees of freedom in deformation as well as the available geometrical parameters. Although this makes design more difficult, it also opens up new prospects to imbue robots with sensing, actuating, and interacting capabilities that were previously unavailable.




