
Researchers in the field of robotics have been working for decades to create robots that resemble humans in both appearance and capabilities. The introduction of more advanced sensors and soft artificial skins, for instance, has opened up exciting new possibilities for the creation of robotic systems that resemble humans.
A new hydrogel-based skin was recently developed by researchers at the Bio-Inspired Robotics Lab at the University of Cambridge. This skin may enable robots to artificially replicate the human sense of touch by detecting the tactile properties of objects. This profoundly stretchable skin, presented in a paper distributed in Materials Today Gadgets, remakes material upgrades utilizing a progression of terminals and a non-model computational methodology.
“As of late, analysts all around the world have been keen on how robots can be fabricated from adaptable and stretchable materials,” David Hardman, one of the specialists who completed the review, told TechXplore. “Working with these “soft” robots is safer; they don’t hurt the things they touch, and they can do things that traditional “rigid” robots can’t do. However, all of a robot’s components, including any sensors, must be soft in order to reap the full benefits.”
“As the foundation of our skin, we use a specially developed sensorized hydrogel that is biodegradable, customizable, and very stretchable,”
David Hardman, one of the researchers who carried out the study,
Hardman and his colleagues set out to develop a stretchable sensing material that could detect any damage, sense objects or a person’s touch, and monitor its surroundings, drawing inspiration from human skin. They used an electrode-based hardware system and a hydrogel, which is a water-insoluble gel that also contains water, to create the artificial skin.
Hardman provided an explanation: “We use a specially developed sensorized hydrogel as the basis of our skin because it is biodegradable, customizable, and very stretchable.” This is paired with Electrical Impedance Tomography (EIT) hardware, which applies currents and measures voltages using electrodes at the skin’s edge to determine the state of the skin. Utilizing these voltages, we attempt to determine where the skin has been contacted or whether it has been harmed.”
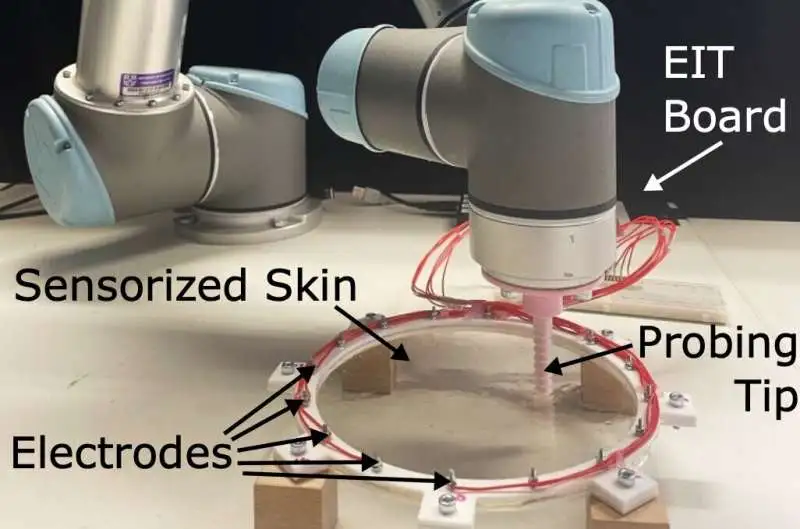
The experimental setup of the team A sensorized hydrogel skin was examined by a mechanical arm while a progression of estimations were gathered utilizing terminals situated around its border. Credit: Hardman, Thuruthel, and Iida
Hardman and his colleagues created deformation maps for their hydrogel-based system using a small amount of real-world data rather than analyzing the data gathered by electrodes using a conventional neural network-based architecture, as the majority of existing artificial skins do. With an average resolution of 12.1 mm over a 170 mm circular skin, they were able to outperform an artificial skin system based on conventional neural networks in the initial tests.
Hardman stated, “Using purely mathematical approaches, combining electrical impedance tomography technologies with functional sensorized skins results in a set of problems that are very difficult to solve.” We have introduced an approach to tremendously improving on this just barely genuine information in our computations. Adding soft tactile sensors to our robots’ entire surface allows us to begin tackling applications that would be impossible with an analytical approach.
Hardman and his colleagues have tested their hydrogel-based skin’s potential for three important real-world applications: damage detection or localization, environmental monitoring, and recognizing various tactile stimuli. Their system did a good job in all three of these tasks, which suggests that it could be used to improve the capabilities of soft robotic systems that are made for different missions.
“We are at present chipping away at working on the shape and size of the skins with the goal that they can be utilized to detect considerably more complicated improvements,” Hardman added. “For instance, if the skin were applied to a robotic hand, we would like it to recognize not only the position of each finger and whether the hand has been damaged but also the force with which it is touched to the skin.”
More information: David Hardman et al, Tactile perception in hydrogel-based robotic skins using data-driven electrical impedance tomography, Materials Today Electronics (2023). DOI: 10.1016/j.mtelec.2023.100032




