While developing new innovations, PC researchers and roboticists frequently draw motivation from creatures and other living life forms. This permits them to misleadingly recreate complex ways of behaving and motion examples to improve their frameworks’ presentation, proficiency, and capacities.
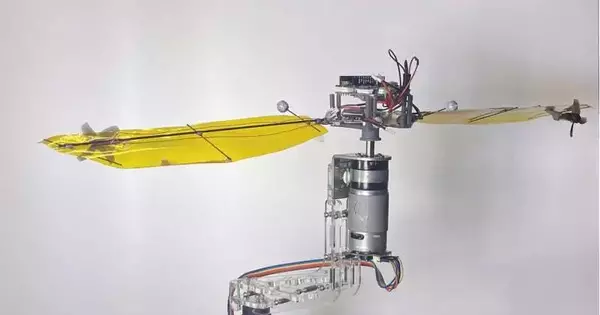
Specialists at Zhejiang Sci-Tech University and the University of Essex have as of late fostered a support learning method that can be utilized to control the development of a beaver-enlivened, single-legged robot. Their strategy, presented in a paper distributed in Robotics and Autonomous Systems, permits the robot to independently figure out how to perform swimming movements that look like those seen in beavers.
“In this study, we offer a biologically inspired reinforcement learning control method to describe the mobility of underwater robots, This method is mostly based on one of our prior studies of beaver motion, which was published in Springer Link’s Journal of Intelligent & Robotic Systems.”
said Gang Chen, one of the paper’s authors.
“In this review, we present an organic roused support learning control strategy to demonstrate the movement of submerged robots,” Gang Chen, one of the scientists who did the review, told us. “This technique is essentially founded on one of our past works concentrating on the movement of beavers, published in Springer Link’s Journal of Intelligent and Robotic Systems.”
Submerged robots, for example, the one made by Chen and his associates, are nonlinear frameworks, and their developments include complex hydrodynamics. Precisely displaying their movement can be an exceptionally complicated and testing task that includes critical registering endeavors.
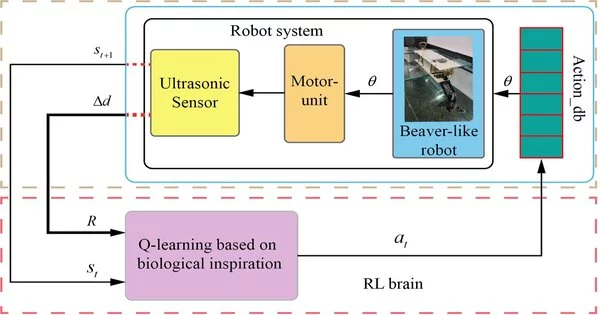
Conversely, with different models to direct the movement of submerged robots presented previously, the methodology concocted by Chen and his partners doesn’t need the mix of complicated movement models in view of hydrodynamics. This is mostly on the grounds that it depends on working on joint point portrayals that powerfully recreate the swimming movement of beavers. These joint portrayals make the model simpler to prepare while additionally decreasing the robot’s incapable movements during preparing.
“By joining support learning with the systems supporting the swimming way of behaving of beavers, our technique executes the robot’s swimming control as fast and operably as could be expected,” Chen made sense of it. “Its most remarkable and exceptional benefit is that it can try not to assemble complex movement control models and immediately understand the swimming control of a beaver-like, single-legged robot.”
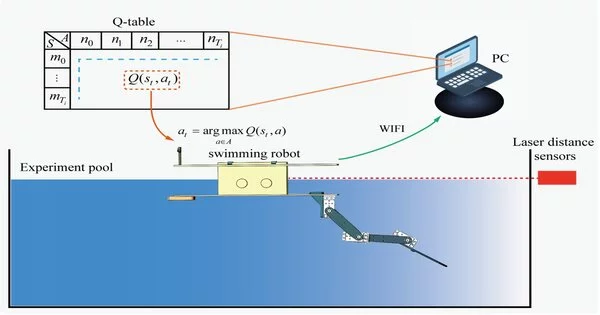
Chen and his partners assessed their beaver-roused support learning-based strategy in a progression of tests, utilizing a solitary legged mechanical stage. Their outcomes were exceptionally encouraging, with their methodology bringing about successful beaver-like swimming movements that improved the robot’s motion.
Later on, the strategy presented by this group of specialists could be utilized to work on the exhibition and development of other one-legged robots intended to work in water. What’s more, their work could spur the advancement of comparable ways to control the developments of other submerged robots.
“In our future work, we intend to work on the construction and execution of the beaver-like swimming robot,” Chen added. “We might likewise want to examine ways of working on the knowledge behind automated swimming movements utilizing support learning, zeroing in on the robot’s swimming speed, yet in addition on swimming strength, direction arranging, and hindrance aversion, all in a genuinely submerged climate.”




