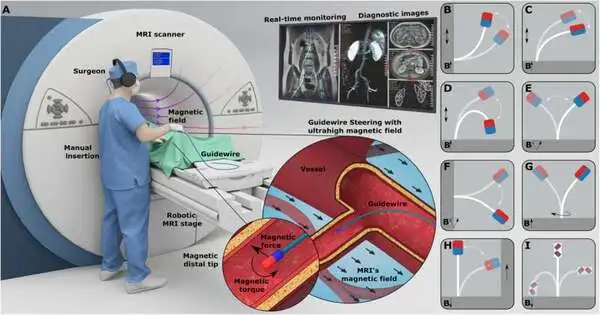
Utilizing remote magnetic steering, physicists and bioengineers can manipulate magnetically driven guidewires for minimally invasive medical procedures. Current magnetic steering strategies are constrained by low magnetic fields, making their integration into ultrahigh-field medical systems, such as MRI scanners, impossible. A magnetic guidewire design and ultrahigh-field steering strategies were developed by Mehmet Tiryaki and a team of researchers from Germany, Switzerland, and Turkey’s departments of physical intelligence, biomedical engineering, and medicine in a new study that was recently published in Science Advances.
The work demonstrated both its capacity for in situ re-magnetization and its extensive research scope. The results showed how a preclinical magnetic resonance imaging scanner using neodymium magnets and a fiber optic rod could use magnetic guidance to steer. The new ultrahigh field magnetic actuation framework can make it easier for clinical MRI scanners to use next-generation magnetic automation.
Developing the magnetic resonance imaging (MRI) system
There are drawbacks with this technology when compared to X-ray fluoroscopy, despite the fact that methods for MRI have been developed for a decade. X-ray fluoroscopy is a more advanced option due to its superior soft tissue contrast and lack of ionizing radiation. Due to the scanner’s smaller workspace area and lower resolution, the MRI system is currently constrained, prompting a number of new enhancement ideas.
A ferromagnet permanent magnet, for instance, can be integrated into a completely remote MRI-powered actuation strategy for intuitive three-dimensional (3D) steering. However, in order for the method to work in an MRI scanner, it needs access to software in real time and additional power. An ultrahigh field magnetic guidewire steering strategy was presented in this study by Tiryaki and colleagues. They also demonstrated its ability to steer in physiologically relevant 3D vascular phantoms with arterial flow and during MRI scanning of an animal model kidney.
At low magnetic fields, permanent magnets are made with a constant magnetization vector that is aligned with the magnet’s easy axis. The magnetic theory of permanent magnets has been studied by physicists at ultrahigh fields; however, the effects of the idea during automated magnetic actuation remain to be investigated.
At extremely high fields, for instance, permanent magnets take on the form of soft magnets. As a result, the team examined the magnetization vector and calculated the permanent magnet’s magnetic force and torque. They investigated the effects of magnetic hysteresis and concentrated on bulk neodymium magnets to determine magnetic material constants and confirm the strength of magnetization.
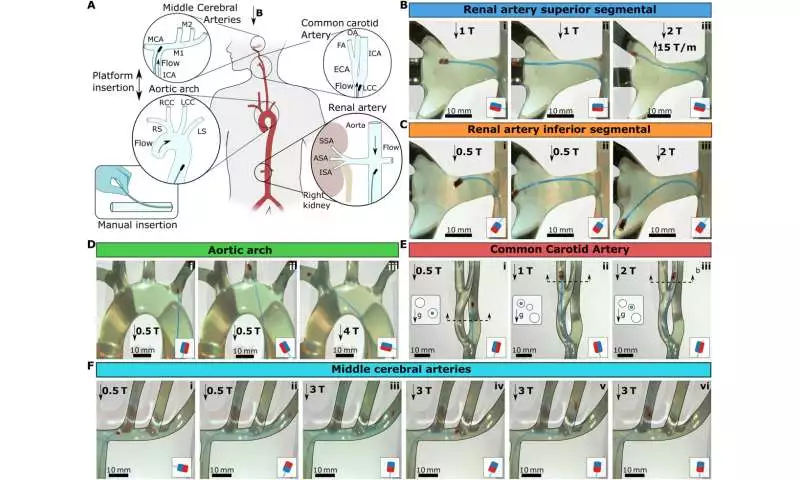
The guidewire addition has been shown in the renal depression of an ex vivo porcine kidney during MR imaging. A guidewire with an opposite magnet was embedded through the urethra into the renal cavity. Due to its 90° tip orientation, the guidewire reached the calyx in front of the entrance to the renal cavity. The tip magnet’s image artifact was used to monitor the tip’s position. Credit: Science is moving forward DOI: Tiryaki and colleagues measured the magnetic field and magnetic gradient in the MRI scanner to model magnetic torque and force. 10.1126/sciadv.adg6438
Magnetic actuation in the MRI scanner and guidewire design To magnetically actuate guidewires and maneuver the magnetic actuation system, they investigated the design of the accompanying flexible construct that formed the elastic core of the guidewire and optimized the stiffness of the flexible body. Additionally, they calculated the magnetization angle and torque acting on the permanent magnet at ultrahigh fields.
The group utilized open-source programming and fostered a Cosserat bar model powerful recreation to emulate the state of the guidewire and included flexible and gravitational powers to grasp their effect on X-ray attractive power and force. They performed bowing reproductions to approve the Youthful’s moduli and different boundaries hidden guidewire elements to proactively utilize the attractive guidewires.
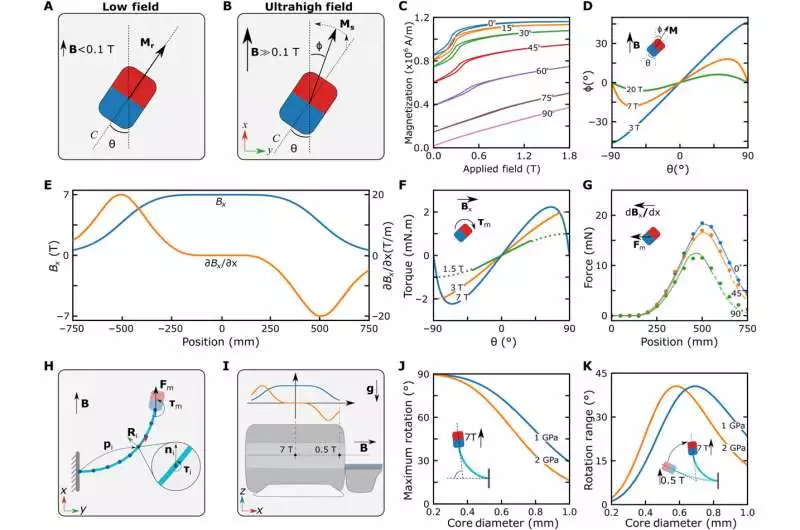
Method of UHF magnetic actuation A) Magnetization at low fields, B 0.1 T. The colors red and blue indicate the easy axis’s direction (C). B) The permanent magnet is significantly magnetized by the external magnetic field at high fields, B > 0.1 T. C) A vibrating sample magnetometer measured the cylindrical neodymium magnet’s magnetization curves at various The magnet’s polarization in the x course is estimated, while the attractive field is cleared from 0 to 1.8 T in the x heading. ( D) Charge vector arrangement as a component of the simple hub arrangement at various outer field qualities. ( E) The MRI scanner’s x-direction magnetic fields and gradients F) Model-put together attractive force acting with respect to the tube shaped magnet as a component of the magnet direction. For the solid lines, the magnet is in its saturation state, while for the dashed lines, it is not. The schematic depicts the torque’s direction. G) The magnetic force in an MRI scanner for various magnet orientations in relation to the magnet position. The strong lines address the power assessed with the polarization model utilizing the X-ray attractive field and angle estimations. The ran lines are the straight model assessment in the nonsaturated locale. The experiments’ force sensor readings are represented by the dots. H) The discretized Cosserat pole model, including the attractive incitation. ( I) A diagram of the simulations of magnetic actuation. J and K) The simulations’ maximum and range of rotation in relation to the guidewire thickness. Credit: Science Advances (2023). DOI: 10.1126/sciadv.adg6438
Magnetic steering modes and in situ magnetization The researchers investigated a variety of automated magnetic actuation systems that enabled magnetic guidewire steering at low fields with high degrees of freedom. Guidewire steering in the MRI scanner became blocked as a result of interactions between the magnetic actuation system and ultrahigh fields in the absence of high degrees of freedom. In order to comprehend this effect, the team placed permanent magnets parallel, perpendicular, and antiparallel to the guidewire tip and studied the guidewire’s cardinal configurations.
Using manual guidewire insertion in the MRI scanner, Tiryaki and colleagues experimented with a variety of steering modes for a variety of navigational tasks. An even more intriguing magnetic guidewire design with dual stability was developed based on the idea of in situ re-magnetization at ultrahigh fields. This guidewire featured two permanent magnets at the tip to allow for a variety of steering experiments to be carried out in a two-dimensional plane.
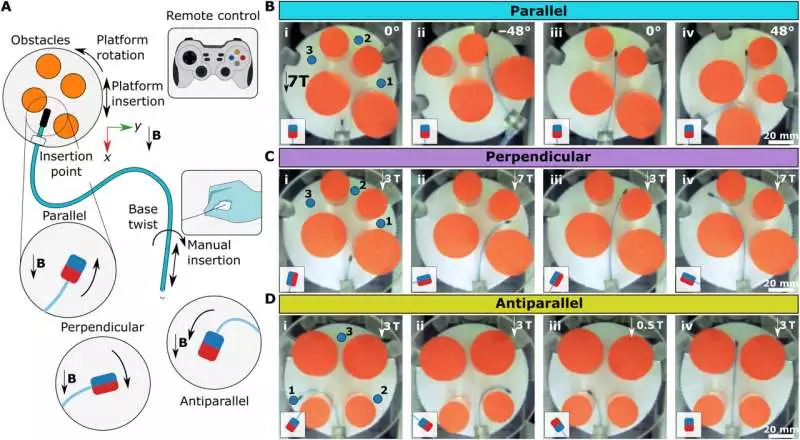
Utilizing magnetic steering at UHF to avoid obstacles. A) Schematic delineation of the snag evasion exploratory arrangement. The impediments are put in the mechanical stage with somewhat controlled movement in the x course and yaw point. An operator manually controls the insertion and twist of the guidewire at the entrance of the MRI scanner bore after it is inserted into the platform through the insertion point. Three distinct magnetic configurations are demonstrated on the same platform. B) Using a parallel magnet guidewire to avoid obstacles The platform rotation and guidewire insertion at 7 T are used to guide the guidewire to the three target points shown in (i), and the magnetic gradient is used as an assistive force in (iv). C) A guidewire and perpendicular magnet obstacle avoidance experiment The platform motion in the x direction and the base twist are used to direct the guidewire to the three target points depicted in (i). Through the strength of the magnetic field, the operator controlled the guidewire’s bending. Throughout the entire navigation, the angle of the platform remains constant. D) Using a guidewire and an antiparallel magnet to avoid obstacles Using base twist, in situ remagnetization, and platform motion in the x direction, the guidewire is directed to the three target points depicted in (i). The initial two objective focuses are arrived at utilizing the antiparallel setup’s bigger bowing. The guidewire is physically constrained by obstacles (iii) at the final target point, and it is remagnetized into a parallel configuration. Credit: Science Advances (2023). DOI: 10.1126/sciadv.adg6438
Three-layered (3D) vascular route and guidewire directing during X-ray
The group performed guiding tests in a sensible 3D vascular engineering of the renal courses, aortic curve, normal carotid vein, and center cerebral corridors, while imitating blood vessel stream with a cardiovascular stream reproduction siphon. The outcomes stressed the ability to explore 3D vessels across different circumstances for clinical applications.
In addition, they conducted guidewire steering experiments in the renal cavity of a porcine kidney ex vivo with guidewires in various magnetic configurations to target various organ regions to investigate ultrahigh field magnetic actuation during MRI. Following a series of visualization experiments across the renal cavity, lower calyx, and upper calyx to examine the guidewire’s steering capacity, they carried out preclinical MRI to observe the boundaries of the renal cavity.
Outlook In this manner, Mehmet Tiryaki and his colleagues introduced the idea of magnetic steering at extremely high fields using magnetic guidewires. They developed design principles for the MRI scanner’s improved steering capabilities by combining mechanics and the theory of magnetism.
Using a series of three-dimensional navigation steps, the physicists found that magnetic guidance steering during MRI imaging was possible. They anticipate that the new method of ultrahigh field actuation will have an impact on clinical scenarios during MRI intervention, facilitating the physical intelligence required for automated clinical intervention practices in the long run.
More information: Mehmet Efe Tiryaki et al, Magnetic guidewire steering at ultrahigh magnetic fields, Science Advances (2023). DOI: 10.1126/sciadv.adg6438
Martin Francis Phelan et al, Heat‐Mitigated Design and Lorentz Force‐Based Steering of an MRI‐Driven Microcatheter toward Minimally Invasive Surgery, Advanced Science (2022). DOI: 10.1002/advs.202105352




