Replicas of humans and animals that are startlingly real have been made possible by recent advancements in robotics.
The most realistic robot in the world is Alex, an $8 million Russian robot with 600 human facial expressions and speech. Sparky, the creation of Chinese startup Hengbot, is the principal mechanical canine with outer muscle appendages; it can run, hop, and do regular-looking canine stunts. And the Belgian Ghent University-developed Scorpio Hexapod can crawl in any direction and provides creepy realism without the sting.
In any case, now and then, for science to push ahead, it should make a stride in reverse. In this instance, a few hesitant steps backward
“Soft mobile robots have a lot of potential for replacing humans in dangerous tasks like nuclear site inspection, search and rescue operations, and planetary exploration.”
Dimuthu Kodippili Arachchige
Analysts at DePaul College in Chicago concentrated on the apparently cumbersome, awkward swaying of pinnipeds to reproduce the movements of automated animals, which they say may one day aid salvage activities.
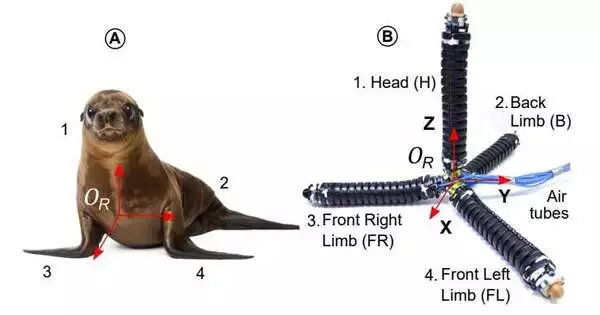
Dimuthu Kodippili Arachchige and his colleagues were interested in pinnipeds, which are technically mammals with fin-footed feet like seals, sea lions, and walruses. They thought pinnipeds could provide mobility that isn’t possible with current “soft-limbed” robotic efforts.
They point to prototype robots that were capable of crawling and undulating but could only move straight and couldn’t turn. Another strategy that attempted to solve the problem of mobility was still constrained by a lack of gait diversity. Further mobility enhancements were provided by a starfish-inspired effort with limbs of varying stiffness, but their slow speed hampered them.
“We aimed to create a robot that has improved degrees of freedom, gait trajectory diversity, limb dexterity, and payload capabilities,” Arachchige stated in his statement.
He stated that the soft-limbed pinniped robot addresses those limitations.
Every robot appendage, around 9.5 inches long by 1.5 inches wide, is driven by three pneumatic muscle actuators. It is possible to fill the limbs with liquid, which makes them stiff; when depleted, the appendages become more adaptable. Based on the limbs’ changing states, the robotic seal changes direction. The gadget is upheld by a defensive external shell and spine.
The robotic seal’s usefulness comes from its ability to bounce and lunge over uneven ground, which can be challenging for robots that try to mimic the movements of animals with four legs, like dogs.
Ironically, when bobbing backwards, the robotic seal moves faster than when moving forward. In reverse, it can move at 6.5 inches per second, but in forward, it slows to 4.5 inches per second.
“The majority of a seal’s weight is concentrated towards the back of their body, yet because of the even circulation of weight in the robot, it becomes challenging to remain upright while at the same time pushing ahead,” Arachchige said. “The robot’s body, on the other hand, helps keep the balance when it moves backwards by absorbing torque from its movement.”
Soft mobile robots are better able to withstand impacts from the ground and maneuver through small spaces with irregular shapes.
“Soft mobile robots have great potential to replace humans in performing dangerous tasks such as nuclear site inspection, search and rescue operations, and planetary exploration,” Arachchige stated regarding the robotic seals’ future.
The gathering’s paper has been acknowledged for the 2023 IEEE/ASME Global Meeting on Cutting-Edge Savvy Mechatronics (Point) and is presently distributed on the arXiv preprint server.
More information: Dimuthu D. K. Arachchige et al, Study on Soft Robotic Pinniped Locomotion, arXiv (2023). DOI: 10.48550/arxiv.2304.06945




