The principal measurably sensible street reenactment has been created by analysts at the College of Michigan. Future work will expand it to include other driving conditions for testing autonomous vehicle software, even though it currently represents a particularly dangerous roundabout.
A machine-learning model was used to train the simulation on data collected at a roundabout on the south side of Ann Arbor, which is one of the most dangerous intersections in Michigan and is conveniently located just a few miles from the research team’s offices.
It was dubbed the Neural Naturalistic Driving Environment, or NeuralNDE, and it turned that data into a model of everyday driving. Before other automobiles, bicyclists, or pedestrians ever cross its path, virtual roadways like this one are required to guarantee the safety of autonomous vehicle software.
“In order to assess the safety performance of autonomous vehicles, the NeuralNDE both replicates the driving environment and, more crucially, realistically simulates these safety-critical circumstances.”
Henry Liu, U-M professor of civil engineering and director of Mcity,
Henry Liu, a professor of civil engineering at the University of Michigan who is also the director of Mcity, a public-private mobility research partnership led by the University of Michigan, stated, “The NeuralNDE reproduces the driving environment and, more importantly, realistically simulates these safety-critical situations so we can evaluate the safety performance of autonomous vehicles.”
In addition, Liu is the study’s corresponding author and director of the Center for Connected and Automated Transportation. As an Editor’s Highlight, the publication has been highlighted.
Safety-critical events, in which a driver must act and make decisions in a split second, rarely occur. Drivers can go a long time without encountering an incident that forces them to swerve or slam on the brakes to avoid a collision, and each incident has its own particular set of circumstances.
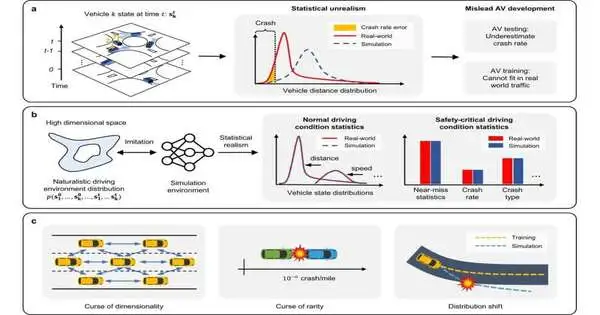
Together, these address two bottlenecks in the work to reenact our streets, known as the “scourge of extraordinariness” and the “scourge of dimensionality” separately. The complexity of the driving environment, which includes things like pavement quality, the current weather, and the various types of road users like pedestrians and bicyclists, is what causes the curse of dimension.
The team tried to see everything in order to model it. At the State Street/Ellsworth Road roundabout, they installed sensor systems on light poles that continuously collect information.
“We chose that location because roundabouts present an extremely challenging urban driving environment for autonomous vehicles. In a traffic circle, drivers are expected to immediately arrange for and help out different drivers traveling through the crossing point. ” Xintao Yan, a Ph.D. student in civil and environmental engineering and the first author of the study, who is advised by Liu, stated that this particular roundabout experiences high traffic volume and is two lanes, which adds to its complexity.”
The NeuralNDE is an important part of the CCAT Safe AI Framework for Trustworthy Edge Scenario Tests, or SAFE TEST, a system created by Liu’s team that uses artificial intelligence to cut the number of testing miles needed to make sure autonomous vehicles are safe by 99.99%.
It basically breaks the “scourge of extraordinariness,” presenting security-basic episodes multiple times more every now and again than they do in genuine driving. Additionally, a project that aims to make it possible to use the Mcity Test Facility for the remote testing of AV software relies on NeuralNDE.
However, these tests take place in mixed reality on closed test tracks like the Mcity Test Facility and the American Center for Mobility in Ypsilanti, Michigan, as opposed to a fully virtual environment. The autonomous vehicles experience not only the actual conditions of the track but also virtual drivers, cyclists, and pedestrians acting in both safe and dangerous ways. By testing these situations in a controlled environment, AV designers can tweak their frameworks to be more likely to handle what is happening.
The NeuralNDE isn’t just useful for AV engineers; it’s also useful for specialists concentrating on human driver conduct. Data on how drivers react to various scenarios can be interpreted by the simulation, assisting in the development of road infrastructure that is more functional.
More information: Xintao Yan et al, Learning naturalistic driving environment with statistical realism, Nature Communications (2023). DOI: 10.1038/s41467-023-37677-5




