



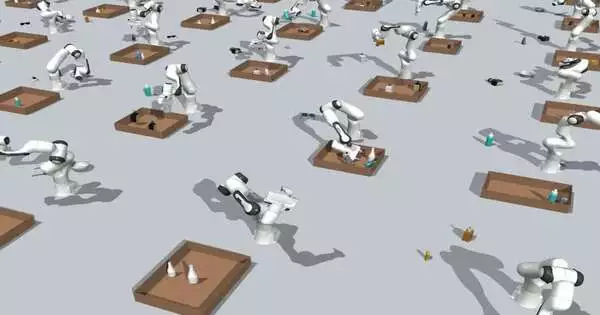
Any individual who has at any point attempted to pack a family-sized measure of gear into a vehicle's estimated trunk realizes this is a difficult issue. Robots battle with thick, pressing errands as well. For the robot, tackling the pressing issue includes fulfilling numerous limitations, for example, stacking baggage so bags don't overturn out of the storage compartment, weighty articles aren't put on top of lighter ones, and impacts between the automated arm and the vehicle's guard are kept away from. A few conventional techniques tackle this issue successively, speculating a fractional arrangement that meets each requirement in turn and